
松下A6伺服驱动器
一、PLC对伺服驱动器的位置控制方式有哪些?
控制方式主要分为两种:
a、PLC脉冲IO口直接向伺服驱动器的脉冲IO口发送脉冲控制电机旋转(本章讲解此方式)
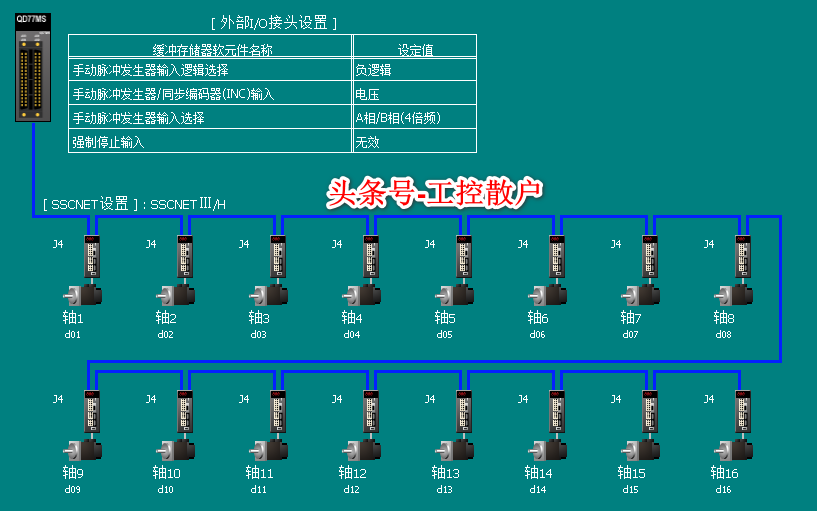
b、PLC通过总线通讯的方式控制伺服电机旋转,比如三菱SSCNETⅢ光纤总线、施耐德CANOPEN总线等,下图所示为三菱SSCNETⅢ光纤总线连接示意图(此方式本章不作讲解)
三菱
二、松下伺服驱动脉冲硬件接线:
Note:松下伺服驱动器的脉冲IO在驱动器的X4接口
a、差分接线方式:
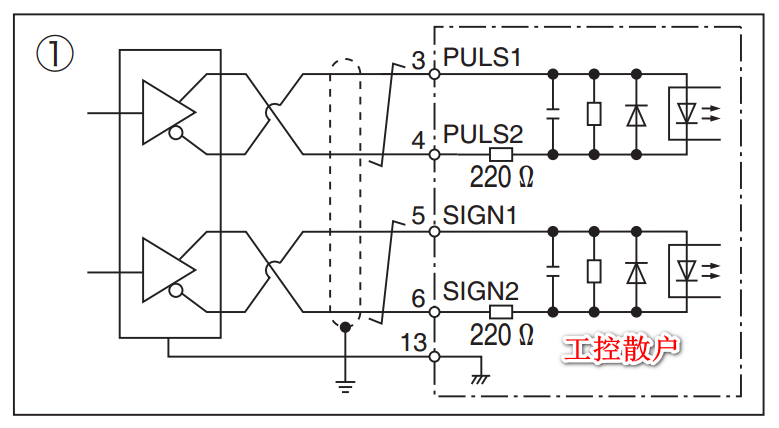
松下伺服差分接线图
采用差分接法的上位机一般输出电压都是5V,所以采用带屏蔽双绞线直接与X4接口的3、4、5、6脚位直接相连即可,无须添加电阻(该接口最大只允许输入500K的脉冲频率)
b、方向脉冲接线方式:
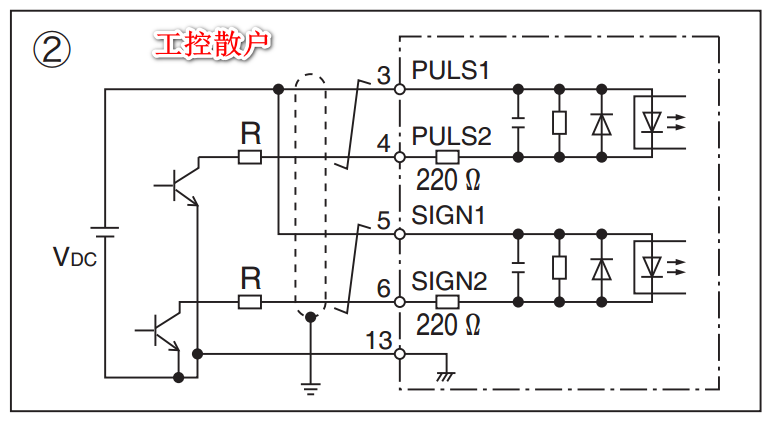
外接电阻接法
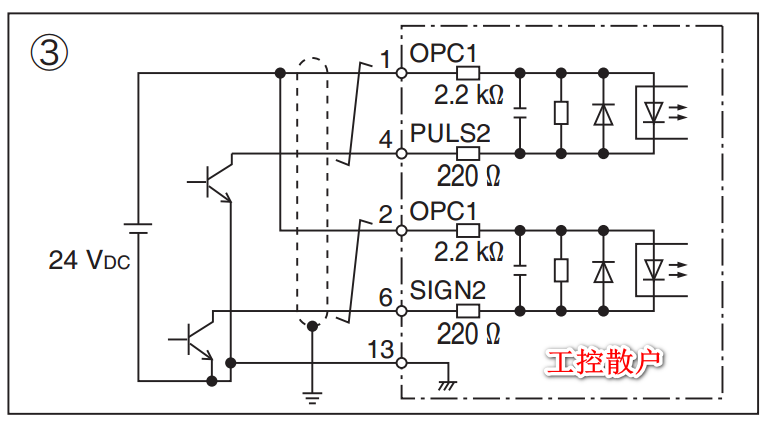
内部电阻接法
上面两个图中图2使用了外接电阻,该脉冲接线脚位为3、4、5、6,24V的脉冲输出系统中R阻值为2K欧姆;图3中没使用外接电阻,但其使用的脉冲输入脚位不同,该脚位为1、4、2、6,从图3中我们可以看到其内部已经接了个2.2K欧姆的电阻,所以24V的脉冲输出系统可不使用外接电阻直接相连;(此模式最大只能接受200K的脉冲频率)
Note:图中所示的都是NPN的脉冲接法,PNP的接法大家可以自己思考下,不明白的可以参考下步进篇的接线,其它伺服驱动器的接线模式和松下的都大同小异,大家多去看驱动器手册
c、高速脉冲接口:
松下伺服有个高速脉冲接口,当伺服脉冲输入超过500K请使用本接口:
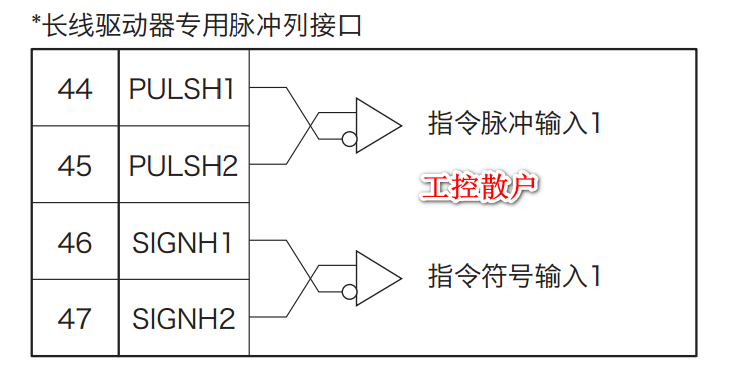
高速脉冲口
此接口需使用差分的接线模式,此接口为松下伺服的一个特色之处
版权声明:文章来源网络聚合,如有问题请联系删除。





