伺服马达(Servomotor)是对用于使用伺服机构的马达(电动机)总称。伺服(Servo)一词来自拉丁文"Servus",本为奴隶(Slave)之意,此指依照命令动作的意义。所谓伺服系统,就是依照指示命令动作所构成的控制装置,应用于马达的伺服控制,将感测器装在马达与控制对象机器上,侦测结果会返回伺服放大器与指令值做比较。

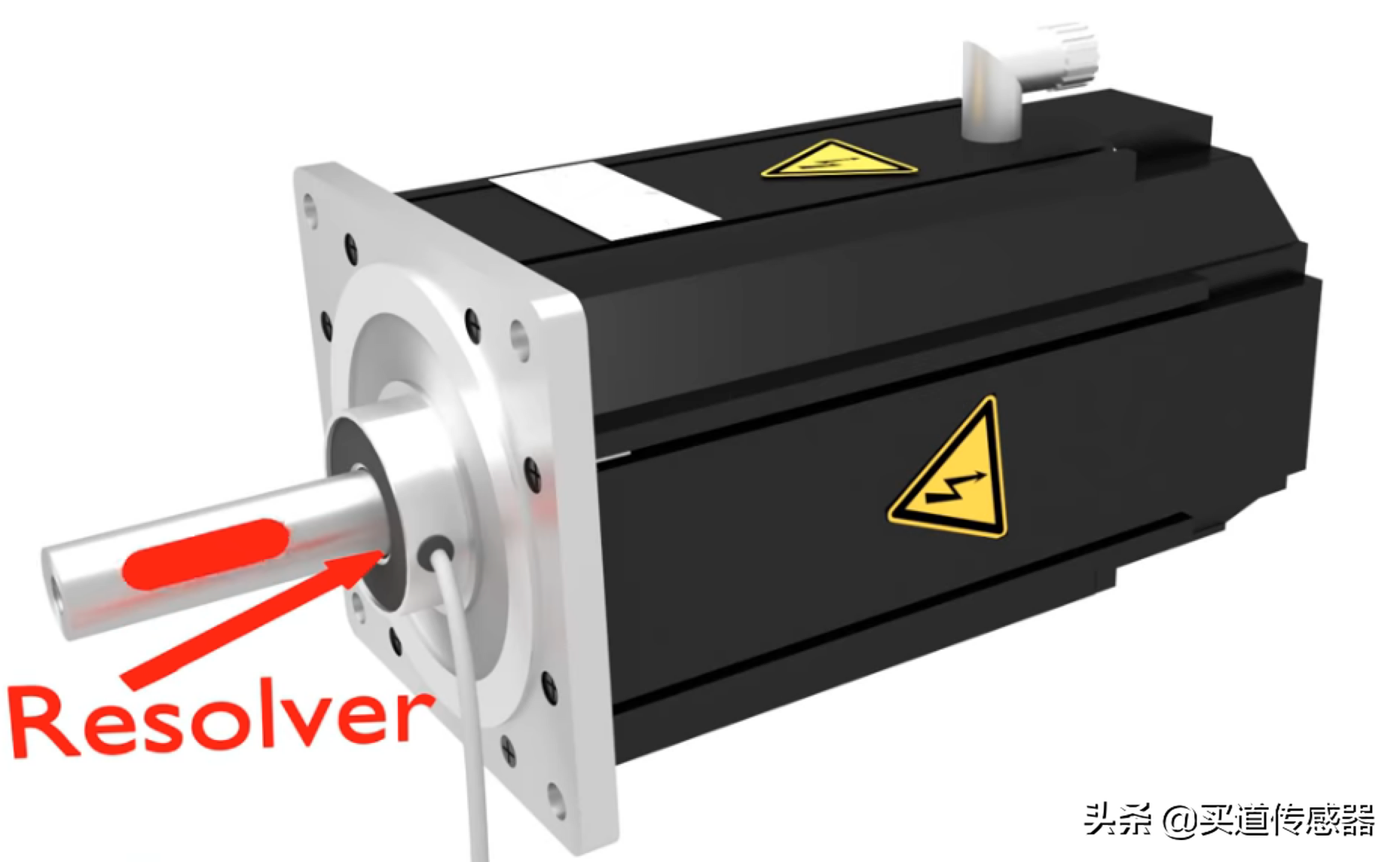
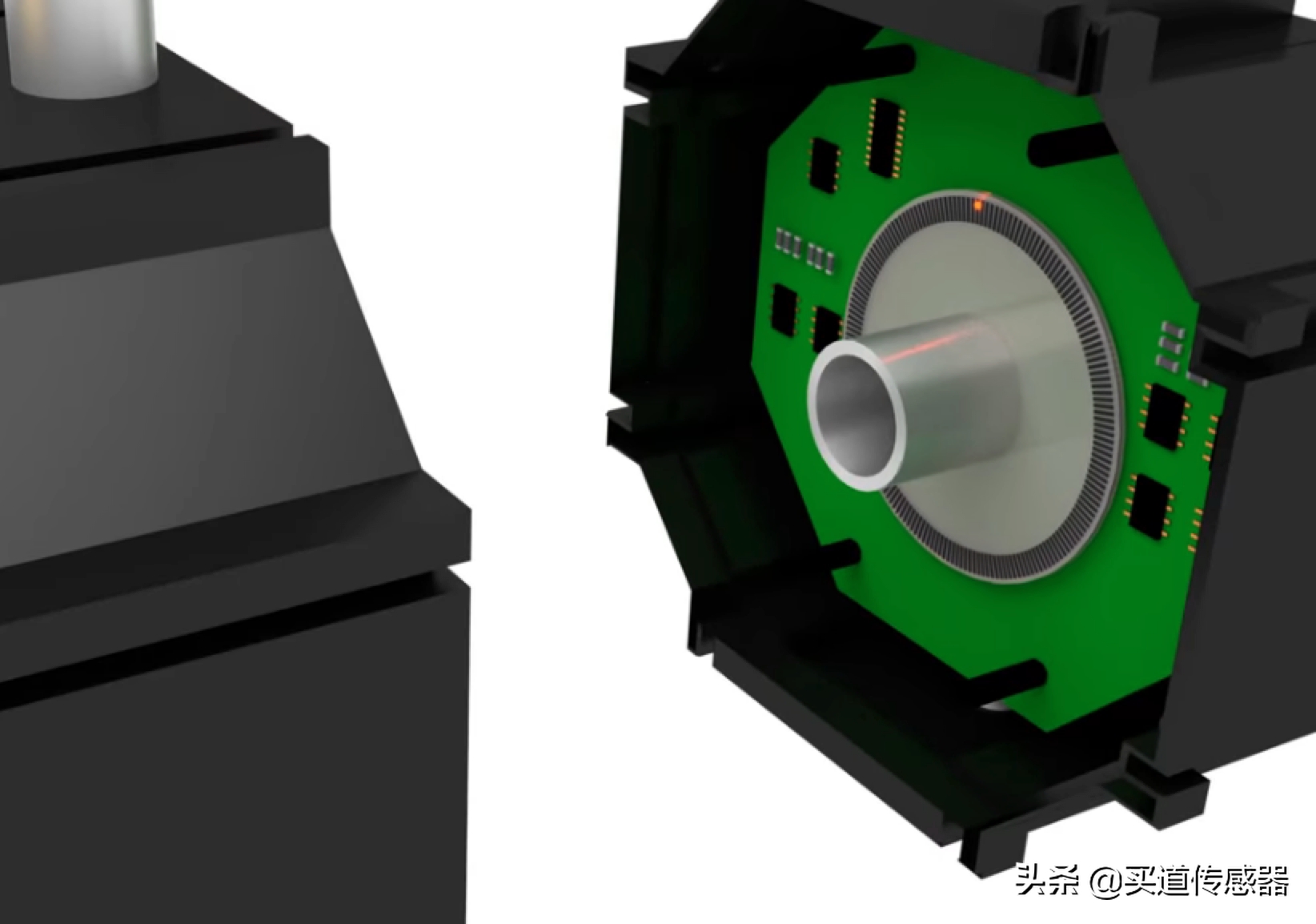
应用于伺服马达通常具有精密的位置检测元件如光电编码器或解角器(resolver)做为位置或速度的回授元件,伺服马达的装置由下列三者构成:
发出动作指令的"指示装置"(控制器,Controller)
依照指示装置的指示讯号与回馈讯号下等指令使马达动作的"控制装置"(伺服放大器),
以及将由伺服放大器而来的电力供给驱动控制对象和侦测其状态的"驱动、感测装置"。
伺服系统是控制结果与目标值的误差量能缩小。将来自控制对象的讯号返回到伺服放大器而反映在控制上,称为回馈(Feedback)。
借由编码器(Encoder)感测马达旋转并回馈的方式,简单方便而广泛使用。相对地,可在控制对象机器外加装置如线性编码器等感测器,其结果在与指示讯号比较,因此多用于需要高精密度控制的用途中。
动作特性
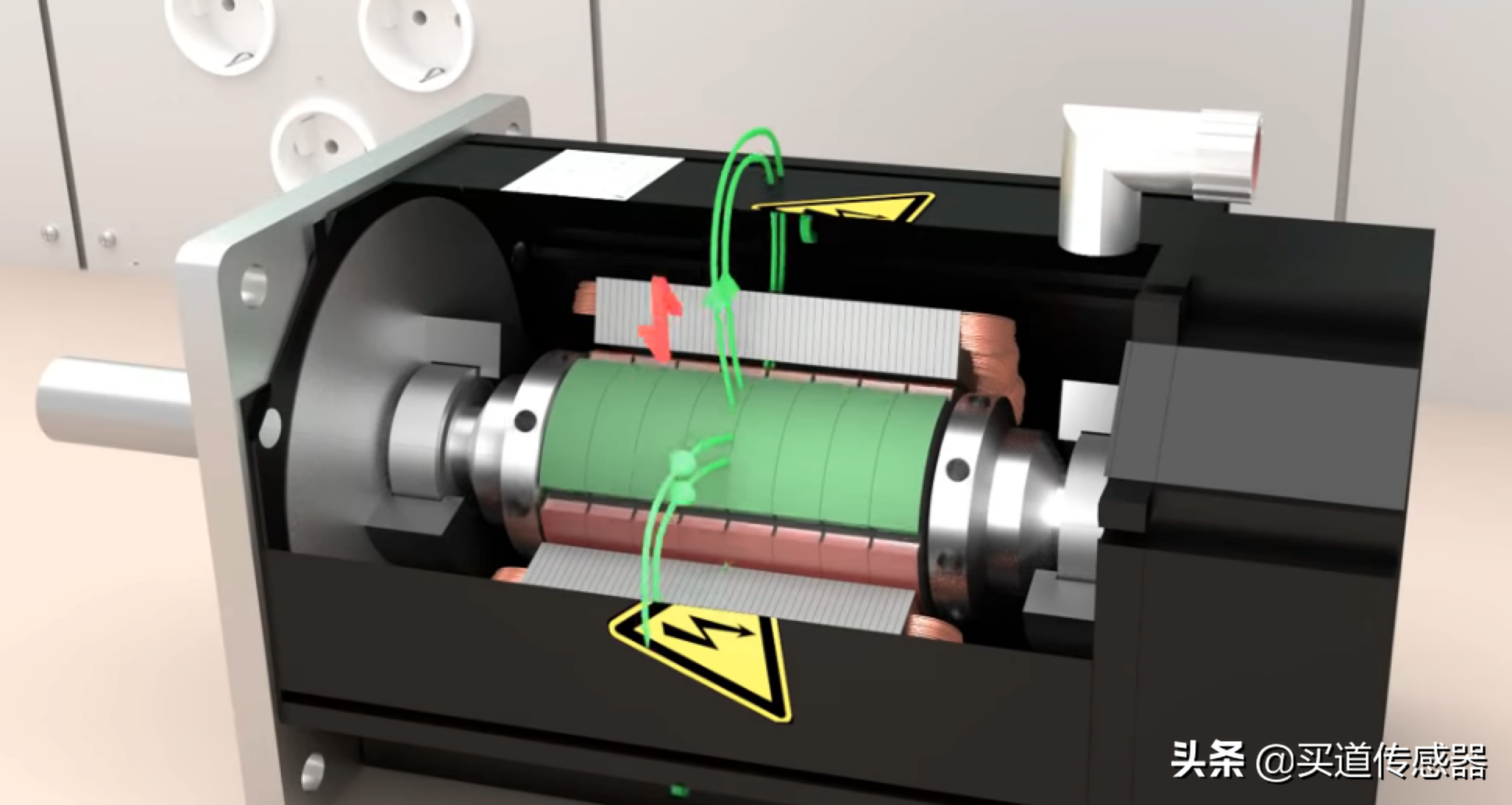
伺服马达的动作特性是进行位置定位控制和动作速度控制,其主要特点是转速可以精确控制,速度控制范围广,可以安定平顺等速运转之外,还可以根据需求随时变更速度。在极低速度也可以稳定转动。能迅速做出正转与逆转,也能迅速加减速。在由静态改为动态运作或由动态改为静态运作所需费时极短,而且即便有外力附加仍可以保持位置。并在额定容量范围内瞬间产生大转矩,输出功率大且效率也高。
版权声明:文章来源网络聚合,如有问题请联系删除。





