概要
可编程控制器的定位指令,产生正转脉冲或者反转脉冲后,增减当前值寄存器的内容。
可编程控制器的电源OFF后,当前值寄存器清零,因此上电后,请务必使机械位置和当前值寄存器的位置相吻合。
在内置定位功能中,用机械原点回归用的DSZR/ZRN指令进行原点回归,使机械位置和可编程控制器中的当前值寄存器相吻合。
功能和动作
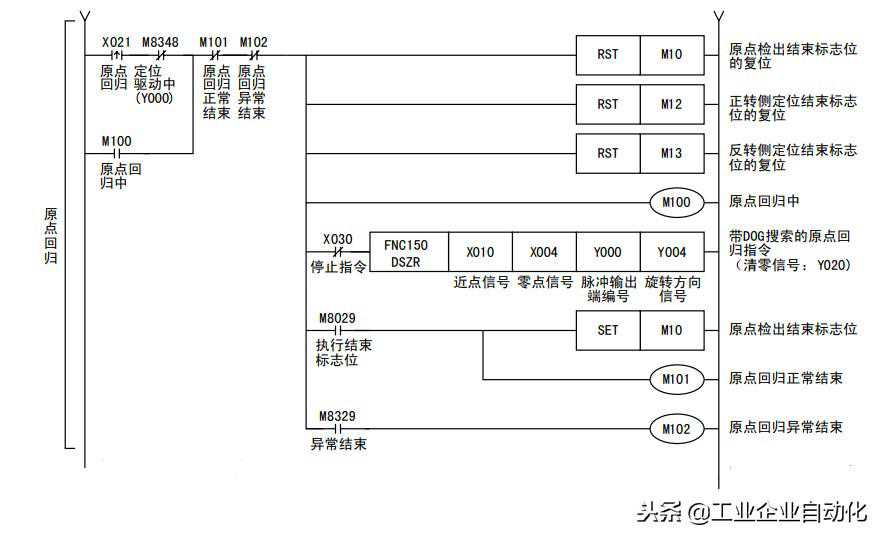
以脉冲输出端指定为Y000为例,说明原点回归动作。如果使用Y001、Y002、Y003时,则请根据使用的输出编号,改读各相关标志位。
1)指定原点回归方向。根据原点回归方向指定标志位(M8342)的ON/OFF来指定原点回归方向。
2)执行原点回归用DSZR指令。
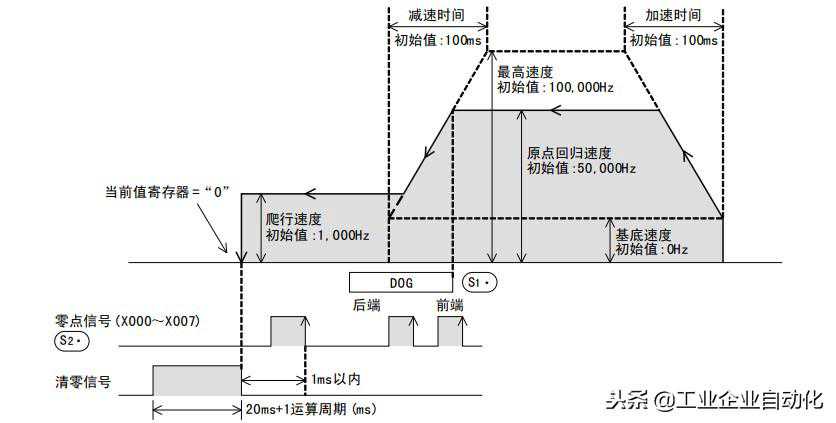
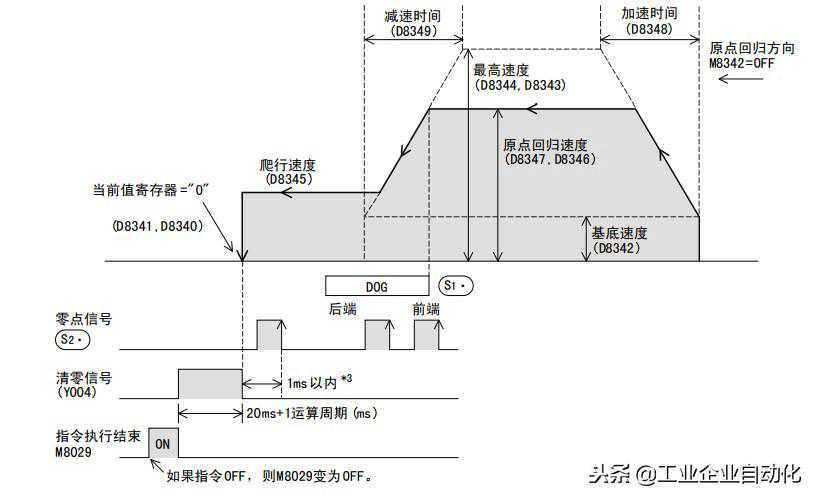
3)向原点回归方向指定标志位(M8342)指定的方向,以原点回归速度(D8347,D8346)指定的速度移动。
4)一旦S1指定的近点信号(DOG)为ON,就开始减速,直到减速到爬行速度(D8345)。
5)S1指定的近点信号(DOG)从ON到OFF后,如果检测到S2指定的零点信号从OFF到ON,则立即停止脉冲的输出。
此外,如果近点信号和零点信号指定了相同的输入,那么和ZRN指令一样,不使用零点信号,在近点信号(DOG)从ON到OFF时,立即停止脉冲的输出。
6)清零信号输出功能(M8341)有效(ON)时,在检测出零点信号的OFF→ON后1ms以内,清零信号(Y004)在「20ms+1个运算周期(ms)」的时间内保持为ON。
7)当前值寄存器(D8341,D8340)变为“0(清零)”。
8)指令执行结束标志位(M8029)为ON,结束原点回归动作。
设计有正转限位、反转限位时,执行使用了DOG搜索功能的原点回归。此时,因原点回归的开始位置不同,原定回归动作也各不同。
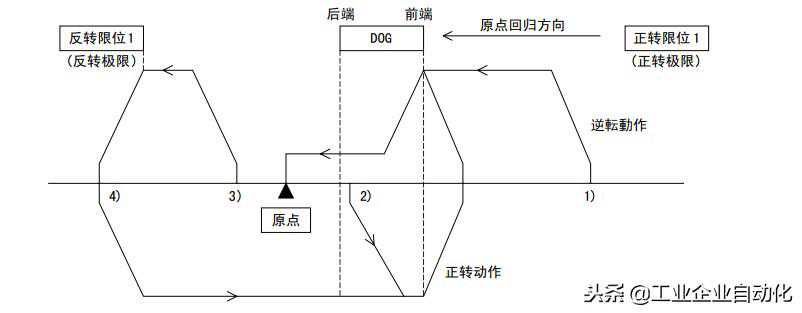
1)开始位置在通过DOG前的时候
a)通过执行原点回归用指令,开始原点回归动作。
b)以原点回归速度,向原点回归方向开始移动。
c)一旦检测出DOG的前端,就开始减速到爬行速度。
d)检测出DOG的后端后,在检测出第一个零点信号时停止。
2)开始位置在通过DOG内的时候
a)通过执行原点回归用指令,开始原点回归动作。
b)以原点回归速度,向与原点回归方向相反的方向开始移动。
c)检测出DOG的前端后减速停止。(离开DOG。)
d)以原点回归速度,向原点回归方向开始移动。(再次进入DOG。)
e)一旦检测出DOG的前端,就开始减速到爬行速度。
f)检测出DOG的后端后,在检测出第一个零点信号时停止。
3)开始位置在近点信号OFF(通过DOG后)的时候
a)通过执行原点回归用指令,开始原点回归动作。
b)以原点回归速度,向原点回归方向开始移动。
c)检测出反转限位1(反转极限)时减速停止。
d)以原点回归速度,向与原点回归方向相反的方向开始移动。
e)检测出DOG的前端后减速停止。(检出(离开)DOG。)
f)以原点回归速度,向原点回归方向开始移动。(再次进入DOG。)
g)一旦检测出DOG的前端,就开始减速到爬行速度。
h)检测出DOG的后端后,在检测出第一个零点信号时停止。
4)原点回归方向的限位开关(正转限位1或者反转限位1)为ON的时候
a)通过执行原点回归用指令,开始原点回归动作。
b)以原点回归速度,向与原点回归方向相反的方向开始移动。
c)检测出DOG的前端后减速停止。(检出(离开)DOG。)
d)以原点回归速度,向原点回归方向开始移动。(再次进入DOG。)
e)一旦检测出DOG的前端,就开始减速到爬行速度。
f)检测出DOG的后端后,在检测出第一个零点信号时停止。