1.ROBOGUIDE界面介绍
1)ROBOGUIDE界面介绍
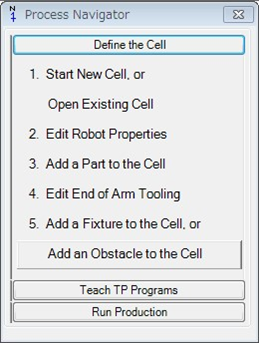
2)单元格浏览器是支持创建工作单元的功能。可以根据单元格浏览器显示的过程轻松创建工作单元。
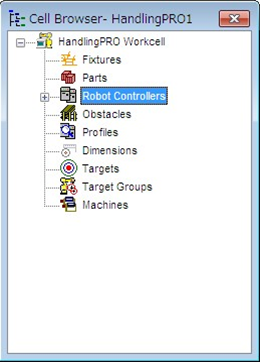
3)单元格浏览器
工作单元的所有元件(机器人,程序,部件等)以树结构显示在单元浏览器上。用户可以从单元浏览器访问这些元素。
Fixtures(夹具)
夹具被定义为放置零件的物体。使用与夹具相关联的部件。当夹具移动时,相关部件也一起移动。为了添加夹具,右键单击单元浏览器中的“夹具”,然后单击“添加夹具”,或从菜单的“单元格”单击“添加夹具”。
Parts(零件)
零件被定义为由机器人处理的对象。为了添加部件,右键单击单元格浏览器中的“部件”,然后单击“添加部件”,或单击菜单“单元格”中的“添加部件”。
RobotControllers(机器人控制器)
机器人控制器被定义为在ROBOGUIDE上创建的虚拟机器人。可以设置程序,工具框,用户框等。
Obstacles(障碍物)
障碍被定义为机器人不应该接触的对象。为了添加障碍,右键单击单元格浏览器中的“障碍物”,然后单击“添加障碍物”,或单击菜单“单元格”中的“添加障碍物”。
Profiles(配置文件)
包括模拟的周期时间的信息显示在配置文件上。模拟开始时,将自动添加配置文件数据。
Dimensions(尺寸)
尺寸定义为工作单元中对象上指定的两点之间的距离。要添加尺寸,请右键单击单元格浏览器中的“尺寸”,然后单击“添加尺寸”,或单击工具栏上的()按钮,并使用距离测量工具。
Targets(目标)
目标被定义为工作单元上的位置信息。为了添加目标,单击工具栏上的()按钮,并使用目标工具。有关如何使用目标工具,请参阅在线帮助。
TargetGroups(目标组)
目标组被定义为目标的分组。TP程序可以从目标组创建。要添加目标组,请右键单击单元格浏览器中的“目标组”,然后单击“添加目标组”,或单击菜单“单元格”中的“添加目标组”。
Machines(机器)
机器被定义为通过伺服电动机或I/O信号操作的外围设备,例如轨道轴和机器人手打开和关闭,以及门的打开和关闭的机床。为了添加机器,右键单击单元格浏览器中的“机器”,然后单击“添加机器”,或单击菜单“单元格”中的“添加机器”。
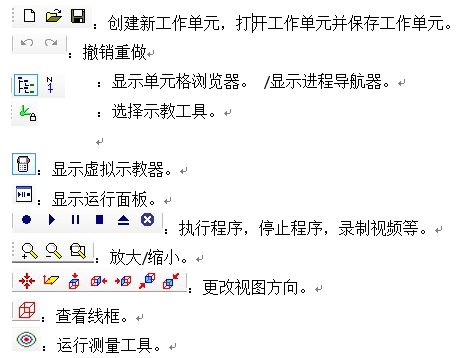
4)工具栏
在工具栏上,经常使用的操作被布置为按钮。如果单击按钮,则可以轻松调用该函数。

5)菜单栏
在菜单栏中,对每个项目分类ROBOGUIDE的功能。从这里选择功能。

6)状态栏
在状态栏中,显示所选机器人控制器和程序的名称,以及错误信息。
旋转视图
向右拖动。
平移视图
按住Ctrl键的同时向右拖动,或在按下滚轮按钮的同时移动鼠标。
放大/缩小
同时按住鼠标的两个按钮或旋转滚轮按钮,在上下方向上移动鼠标。
选择对象
左键单击对象。
打开对象属性页
左键双击一个对象。
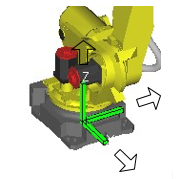
沿一个轴移动对象
选择一个对象,并在其上显示绿色三元组。向左拖动一个轴。
移动对象
选择一个对象,并在其上显示绿色三元组。在按住Ctrl键的同时向左拖动绿色三元组。
旋转对象
选择一个对象,并显示一个绿色三元组,在按住Shift键的同时向左拖动一个轴。
将机器人的TCP移动到对象的表面
在按住Ctrl和Shift键的同时左键单击曲面,然后TCP移动到单击位置。
将机器人的TCP移动到对象的边缘
在按住Ctrl和Alt键的同时左键单击边缘,然后TCP移动到单击位置。
将机器人的TCP移动到对象的顶部



")

