NC单元也叫位置控制单元(PositionControlUnit,简称PCU),是在CPU单元不能满足定位精度的情况下,所采用的高速度、高精度的定位单元。NC单元目前有CJ1W-NC□□3、CJ1W-NC□□4、CS1W-NC□□3、CJ1W-NC□71、CS1W-NC□71、
CJ1W-NC□81、CJ1W-NC□82等系列。
一、NC单元特点
NC□□3
NC□□4
NC□71
NC□81/82
响应速度/控制周期
2ms
0.1ms
250us-8ms
0.25-2ms
操作方式
存储100条/直接
存储500条/直接
同步通信执行指令直接操作
存储500条/同步通信执行指令直接操作
轴数
1、2、4轴
2、4轴
2、4、16轴
2、4、8、16轴
插补
直线
直线/圆弧
直线/圆弧/螺旋
电机驱动器
步进/脉冲型伺服
步进/脉冲型伺服/线性电机/直驱电机
MECHATROLINK-II总线伺服
内置EtherCAT通信功能的G5系列伺服
中断进给
有0.1ms
有
有
有
定位范围
-1073741823~1073741823
-2147483648~+2147483647
-2147483648~+2147483647指令单元
-2147483648~+2147483647指令单元
速度
1-500kpps
1-4Mpps
0-2147483647指令单元/s
104Mpps转换值
精度
1/500kpps
1/4Mpps
1/104857600pps
超驰
1-999%
0.01-500.00%
0.01~32767.67%
0.01~500.00%
同步控制
5单元/20轴
高速计数器/带绝对编码器
有
有
索引表控制
有
进给器控制
有
MPG功能
有
示教
有
有
有
齿隙补偿
有
有
有
有
区域设置
有
有
有
S曲线加减速
有
有
梯形/S形
有
电子凸轮
有
部分有
传送速率
10Mbps
100Mbps
传送距离
50m
节点间100m
通信方式
主-从完成同步
主-从串级链
通信介质
屏蔽双绞线
5类屏蔽双绞线RJ45连接器
节点多样性
有
二、CJ1W-NC213单元的直接操作实例
直接操作,意思是定位的位置、速度、加减速时间等,直接由CPU单元的程序设定,定位执行由CPU单元的程序指令执行,也可以根据指令执行中途改变位置(包括方向)、速度。直接操作模式中不可以使用插补。
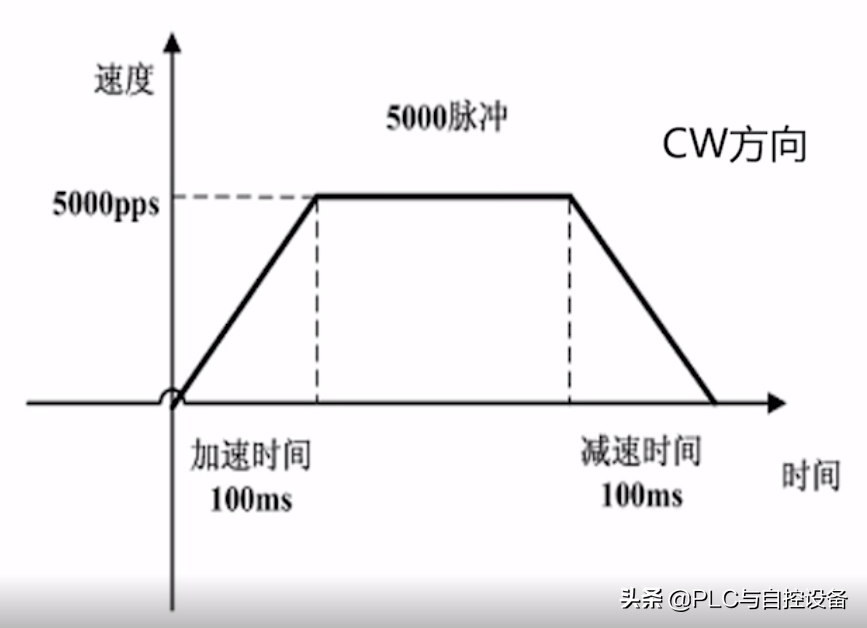
如要实现上图中的定位要求:速度5000pps、加减速时间100ms、绝对定位方式移动5000个脉冲、方向为CW方向,要如何实现呢?
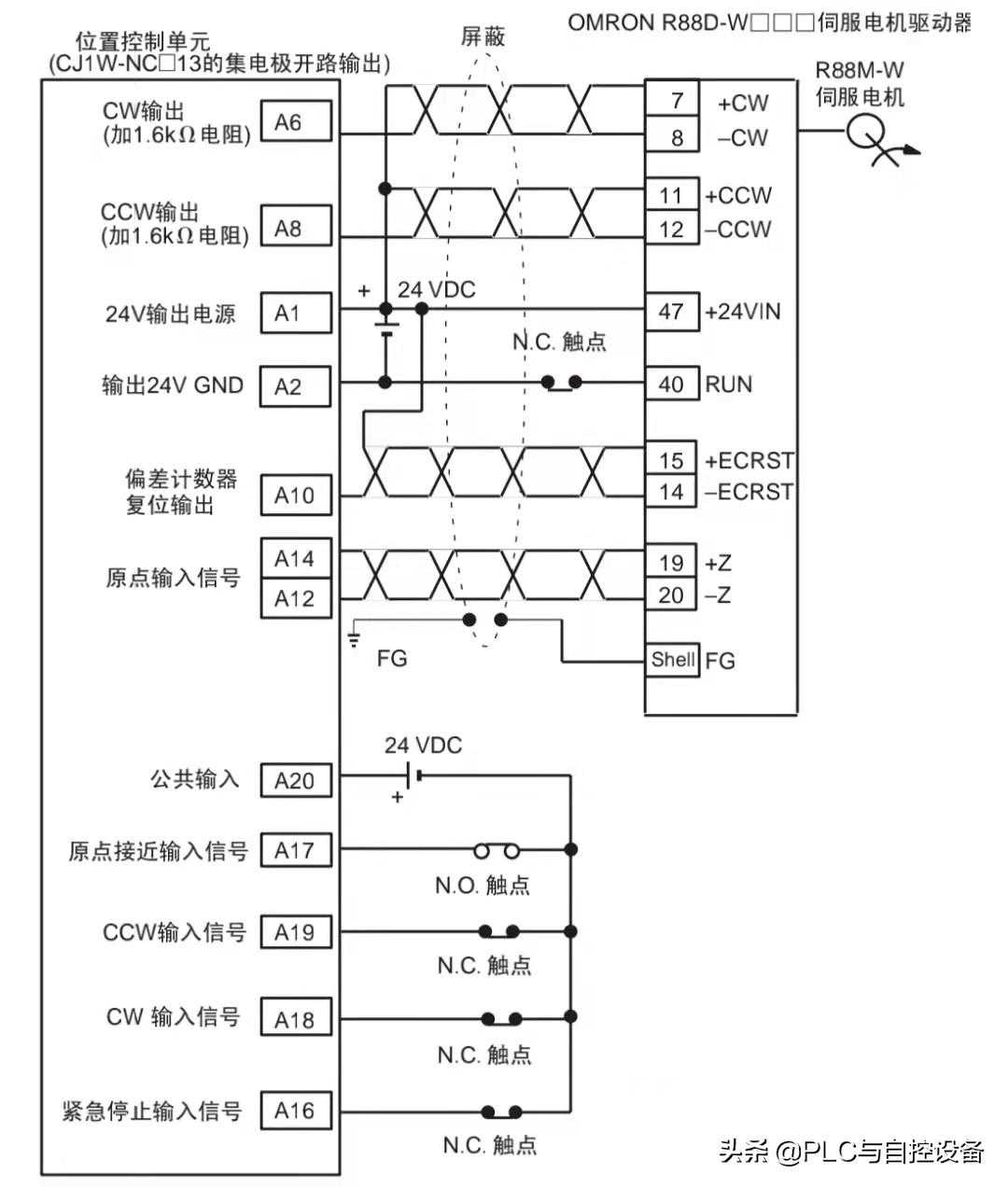
(一)、硬件接线
NC单元与伺服驱动器的连接如下图所示:
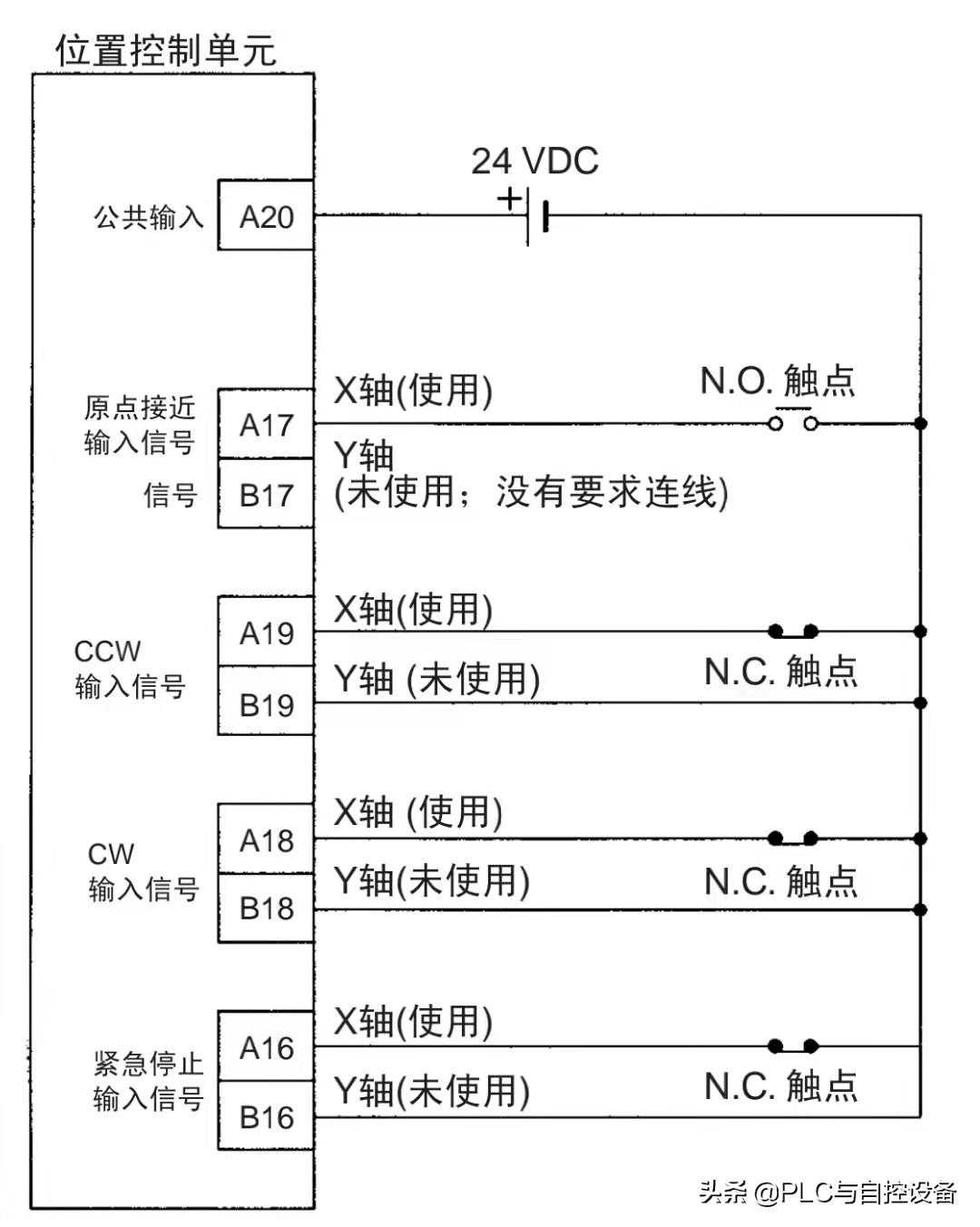
NC单元未使用轴的连接如下图所示:
使用伺服继电器单元和连接专用电缆可以减少接线。
(二)、参数设置
NC单元自带有CPU,同时它在PLC的CPU单元中也有4个数据存储区域与之对应,从下图中由上到下分别称之为n区、I区、m区、k区。
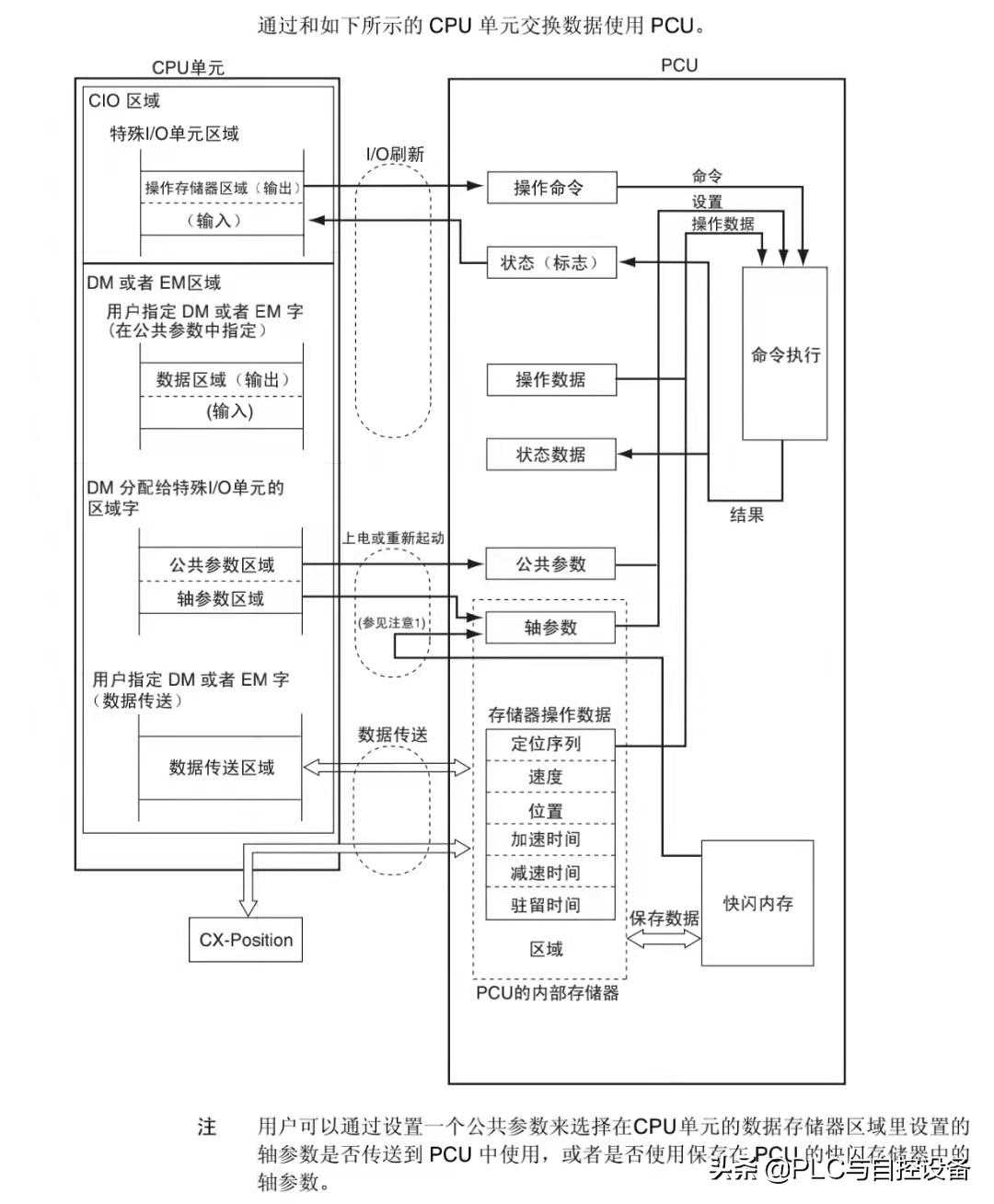
1、其中k区的作用是传递数据到NC单元内。
2、m区为公共参数和轴参数区,其中公共参数占用(m~m+3),开始字m=D20000+100*单元号。
m可以为0000,000D,0X0E。
0000:分配给特殊IO单元的数据存储区字,在轴参数后被连续分配。
000D:用户定义I区(操作数据区),开始字为m+1中定义。
0X0E:用户定义EM区域字,X为块号。
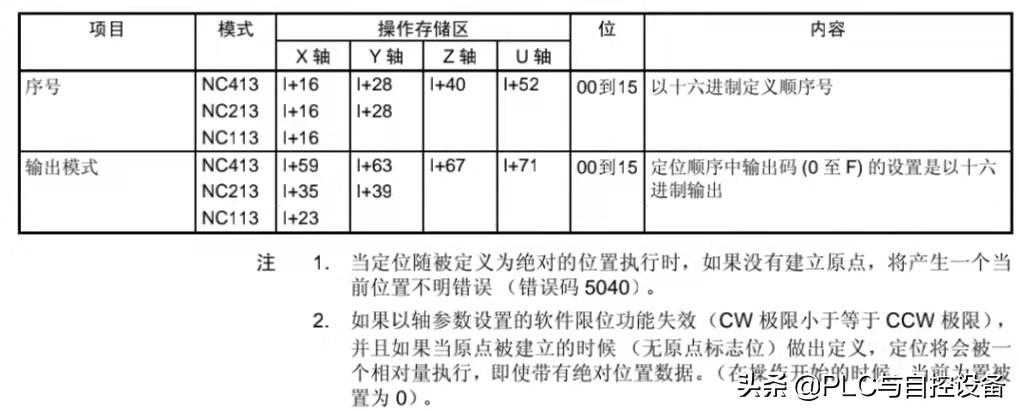
m+1定义I区(操作数据区)开始字,用十六进制数表示。
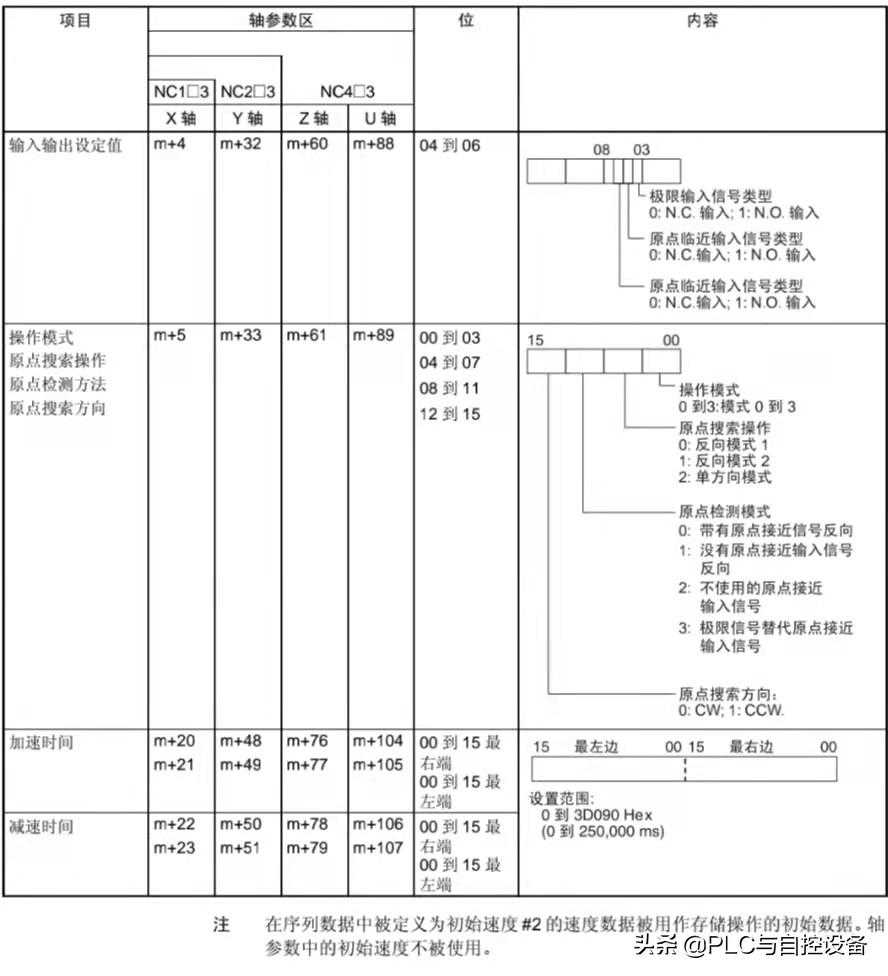
m+2轴参数定义(标识指定)。参数标识占用00-07位,轴标识占用08-15位。参数标识中,00,使用快闪存储器中的轴参数;01分配给特殊IO单元的数据存储区为轴参数。轴标识中,08为x轴定义,09为y轴定义,10为z轴定义,11为u轴定义。位为0,使用分配给特殊IO单元的数据存储区域中的轴参数设置;位为1,使用缺省轴参数设置。
m+3系统保留。

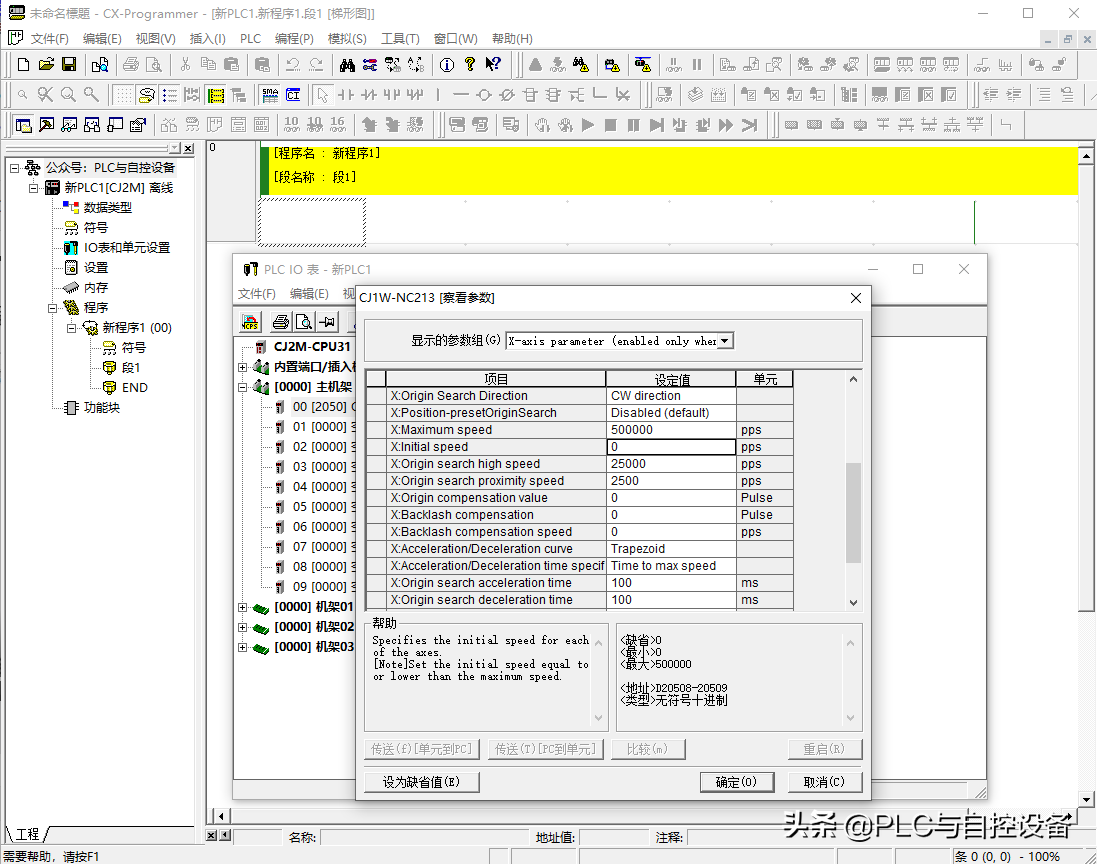
m+4~m+59/m+115为轴(x、y/x、y、z、u)参数区域。在IO表中通过特殊IO单元号设定轴参数。
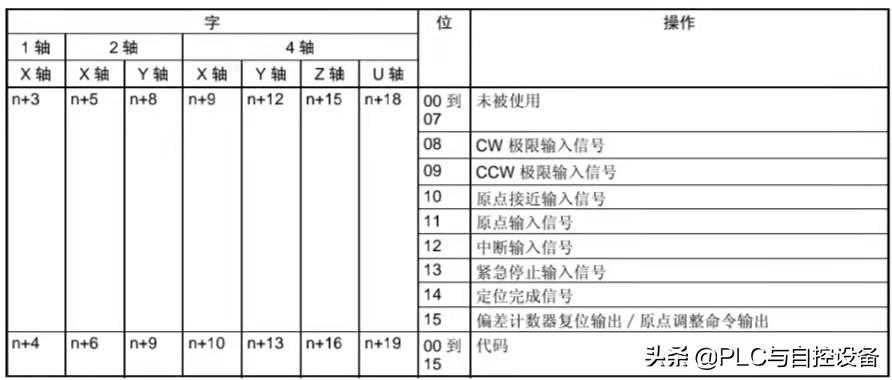
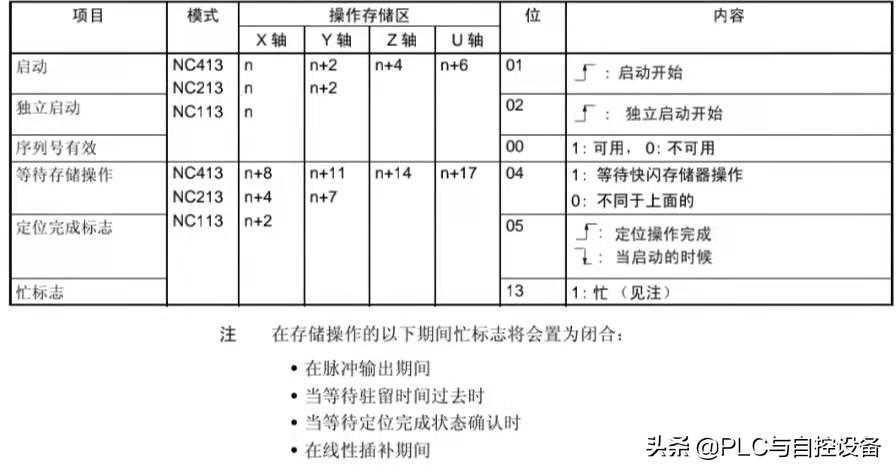
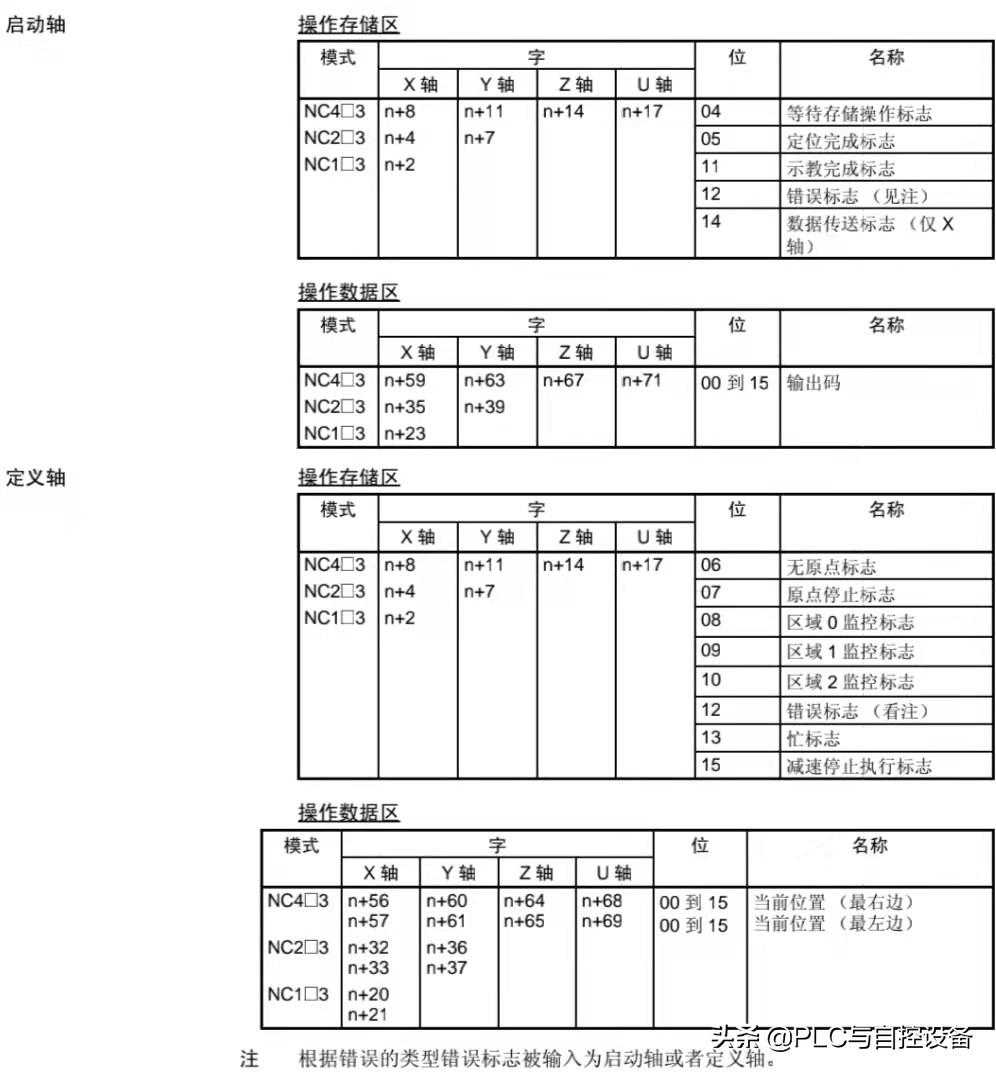
3、n区为操作存储器区,作用是对NC单元进行控制输出(序列号使能、操作控制位、读写数据位等),及NC单元状态的返回(标志位、原点信号位、错误代码等)。
开始字n=2000+10*单元号,其中1轴占用n~n+4共5个字,其中2轴占用n~n+9共10个字,其中4轴占用n~n+19共20个字。
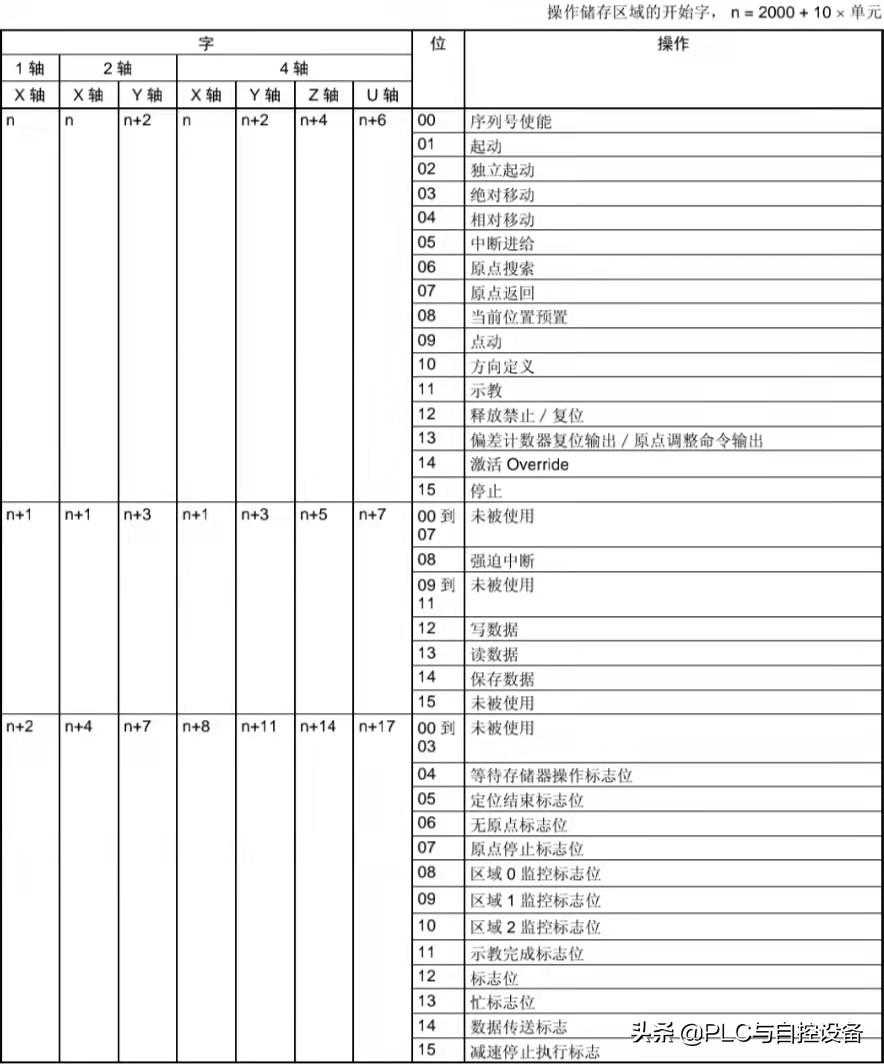
编写程序执行命令位功能时,要结合NC单元的当前状态,如轴是否忙,是否有原点,是否报错等。
4、I区为操作数据区,开始字由公共参数m~m+1指定,作用是设定NC单元直接操作、存储器操作的操作数据、特殊功能操作数据、NC单元状态数据,以及k区(数据传送区)参数定义等。
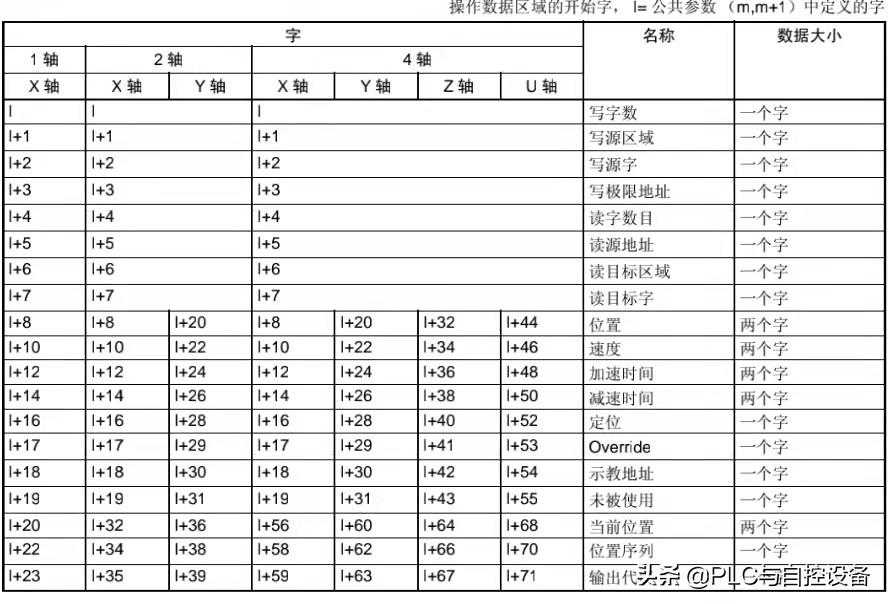
5、CJ1W-NC213单元参数设置
如单元号为5,则公共参数m~m+3的地址对应为:
m区
m
m+1
m+2
m+3
地址
D20500
D20501
D20502
D20503
内容
000D
01F4
0000
0000
因m+1中设定的内容为内容
00001388
00001388
00000064
00000064
内容
5000
5000
100
100
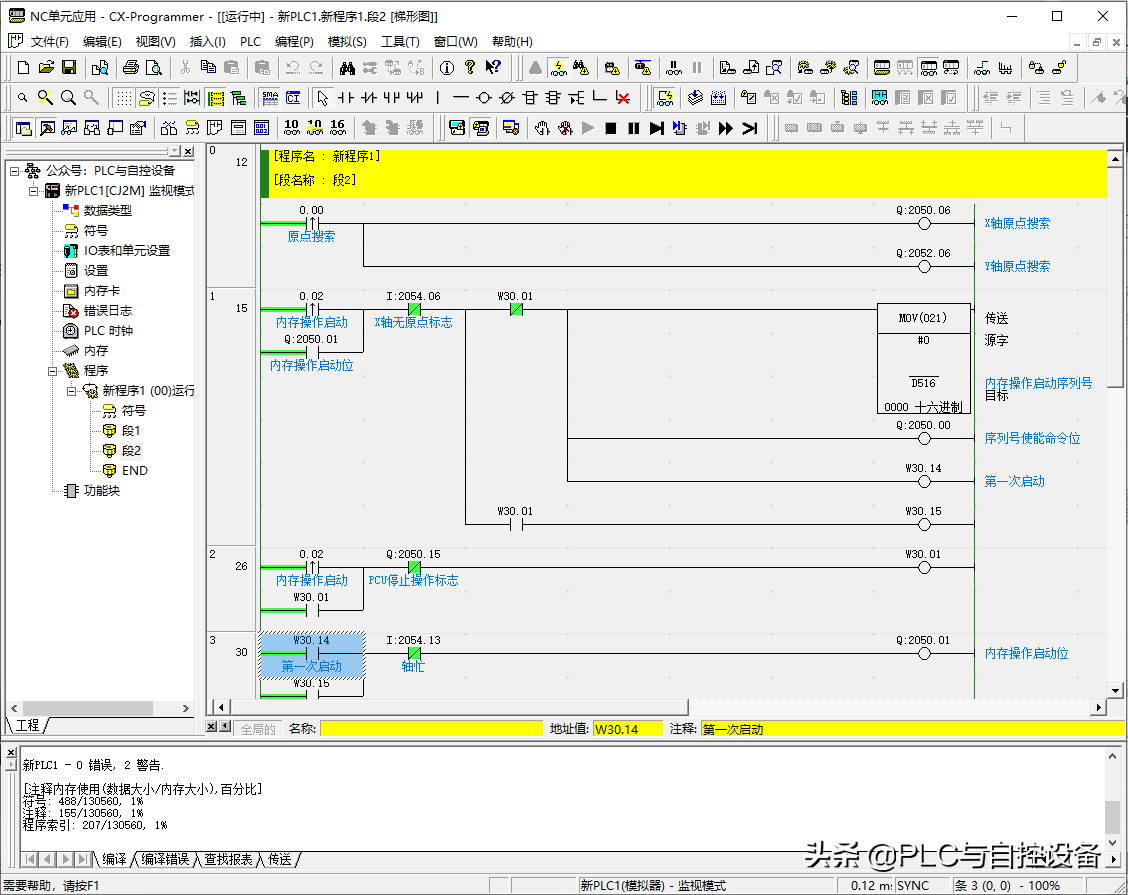
(三)、程序编写
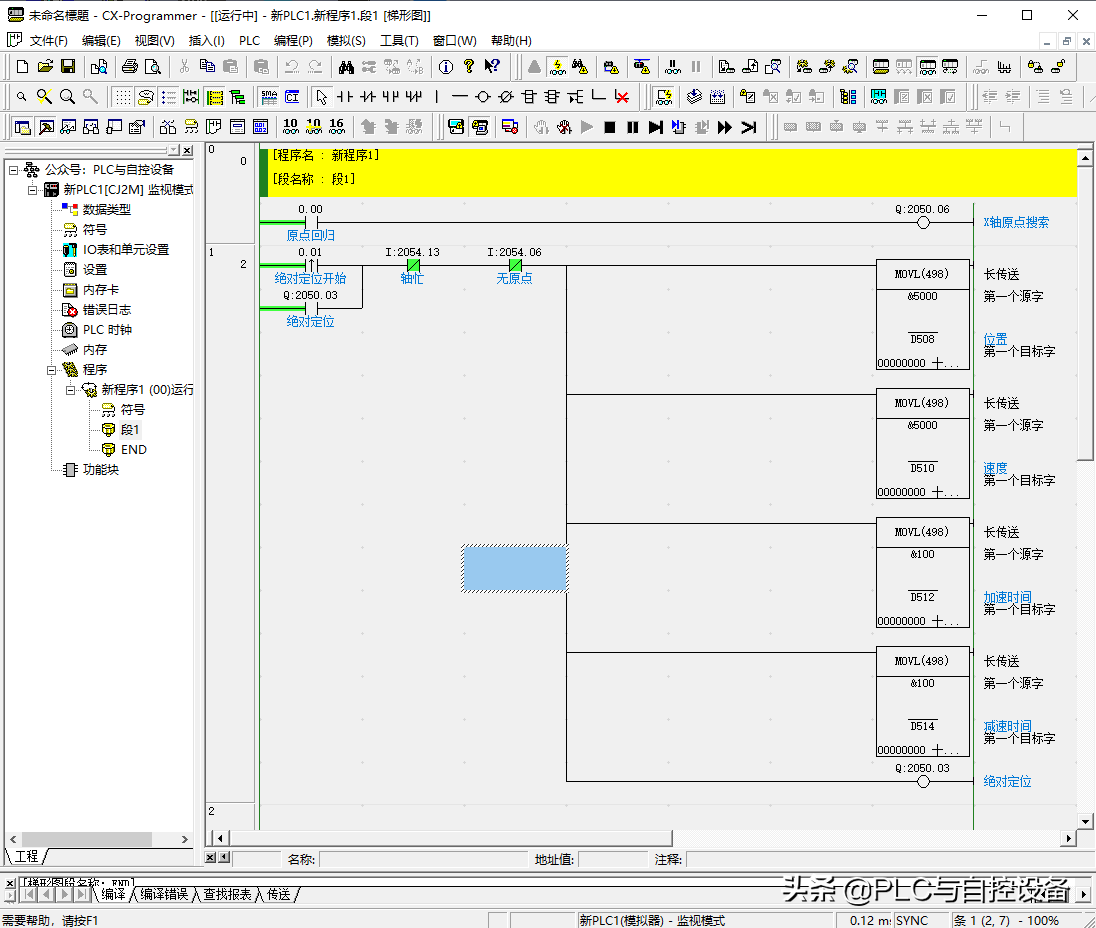
三、CJ1W-NC213单元的内存操作实例
内存操作是指定位控制所需的参数数据(定位序列、位置、速度、加减速时间)被预先传输到NC位置控制单元中,NC单元根据PLCCPU向工作存储器区发出命令,执行相应的定位序列来完成定位控制。内存操作可以通过序列的完成码,实现包括插补在内的复杂多样的定位控制。
内存操作的实现方法,现举例说明如下。
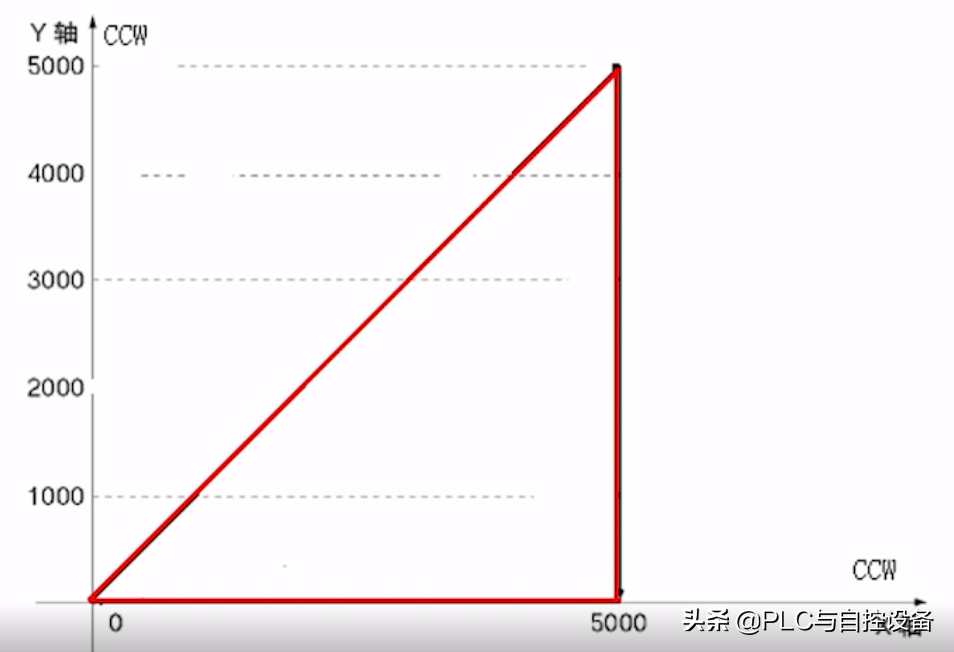
利用CJ1W-N213的内存操作,完成如上图所示的定位要求:xy轴直线插补从(0,0)移动到(5000,5000),然后y轴回到0点,x轴回到0点,插补速度为500。
(一)、硬件接线
硬件接线方法与NC单元的直接操作方式的接线方法一样,单元号设定为5。
(二)、参数设置
1、公共参数设置
m区参数
m
m+1
m+2
m+3
地址
D20500
D20501
D20502
D20503
内容
000D
01F4
0000
0000
01F4指定I区的起始字为D500。
以上参数设置并下载到NC单元后,断电重启一次,让设置生效。
2、序列号指定设置
序列号指定字为D516。
3、内存操作相关命令及状态反馈
(三)、定位序列编辑
1、CX-Position操作
在CX-Programmer中创建IO表,右击NC模块,选择“启动专用应用程序”→“继承设定启动”,打开CX-Position软件。
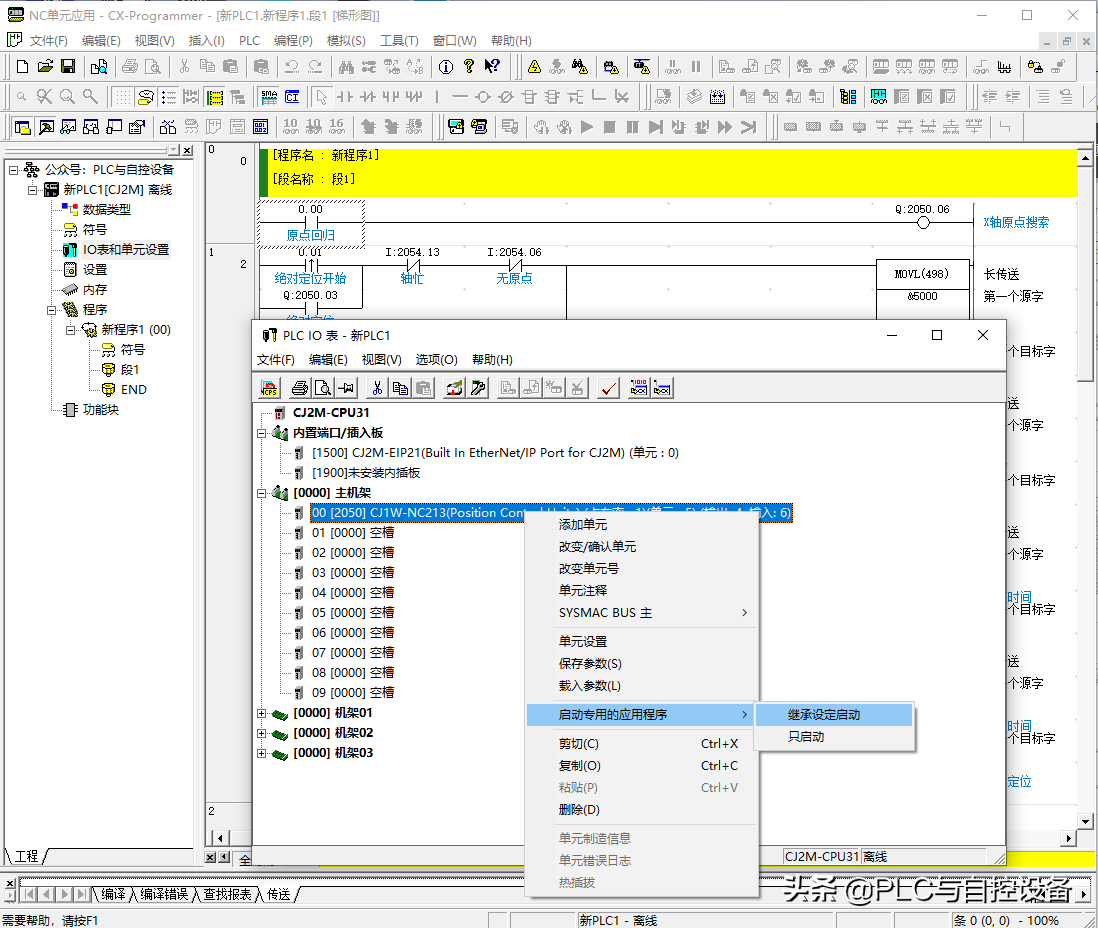
在CX-Position软件中设定下表数据。
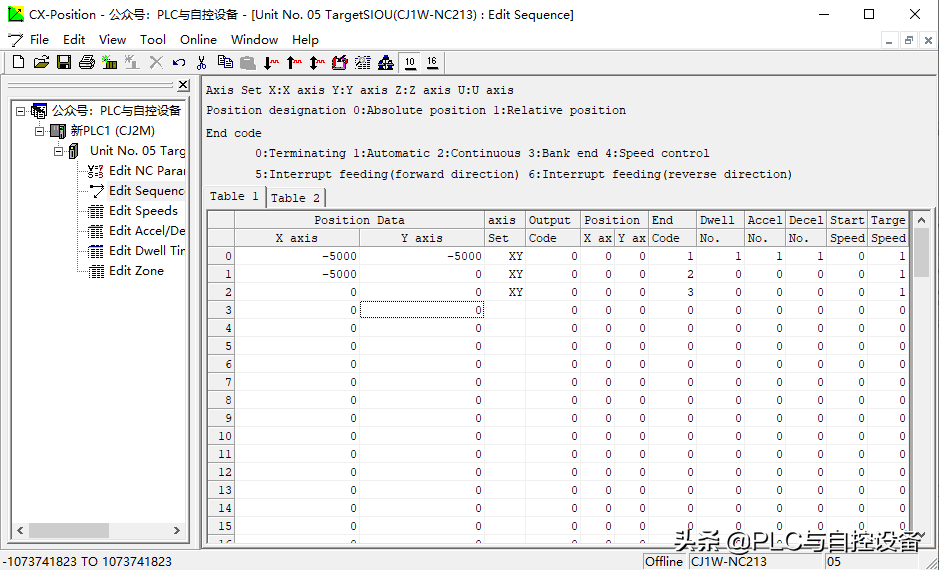
Table1,是指选择当前序列的启动轴为X轴。对于除了轴数据之外的数据,启动操作的轴的数据被用作在序列数据中被定义的数据。
在位置数据(PositionData)中,分别设置X轴Y轴的坐标数据,注意轴的运行方向为CCW(负方向)。
轴设置(axisSet)设为“XY”(定义轴)。
位置指定(PositionXax/Yax)设为“0”,表示是绝对位置;设为“1”,表示是相对位置。
完成码(Code)设为“1”,表示自动完成,序列之间根据间隔时间驻留;设为“2”,表示连续完成,不允许有驻留时间;设为“3”,表示块结束,定位完成后被停止,当启动再次被执行,定位将按照定义的序列号从头开始执行。还有4、5、6分别表示速度控制、正向中断进给、反向中断进给。
驻留时间、加减速时间、速度数据需要分别进行设置。
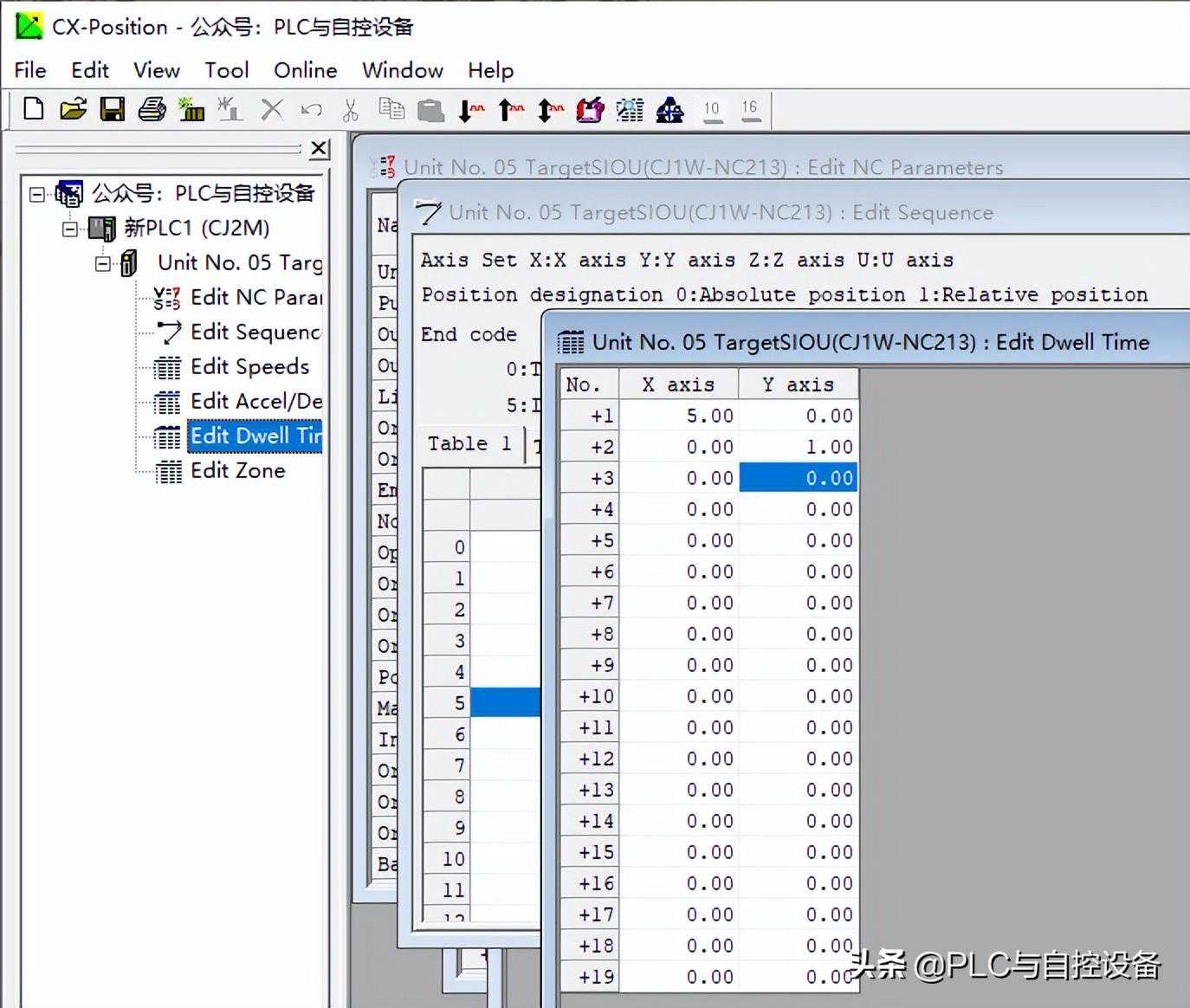
驻留时间编号(DwellNo.)设为“1”,表示执行驻留时间编号的驻留时间5秒。
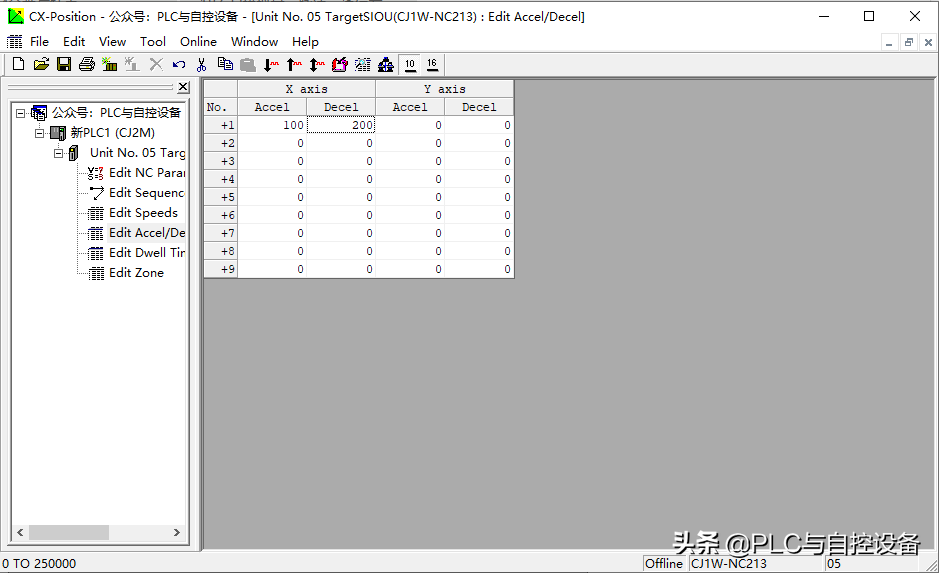
加速时间编号(AccelNo.)/减速时间编号(DecelNo.)设为“1”,表示执行加/减速时间编号的加/减速时间值(100ms/200ms)。
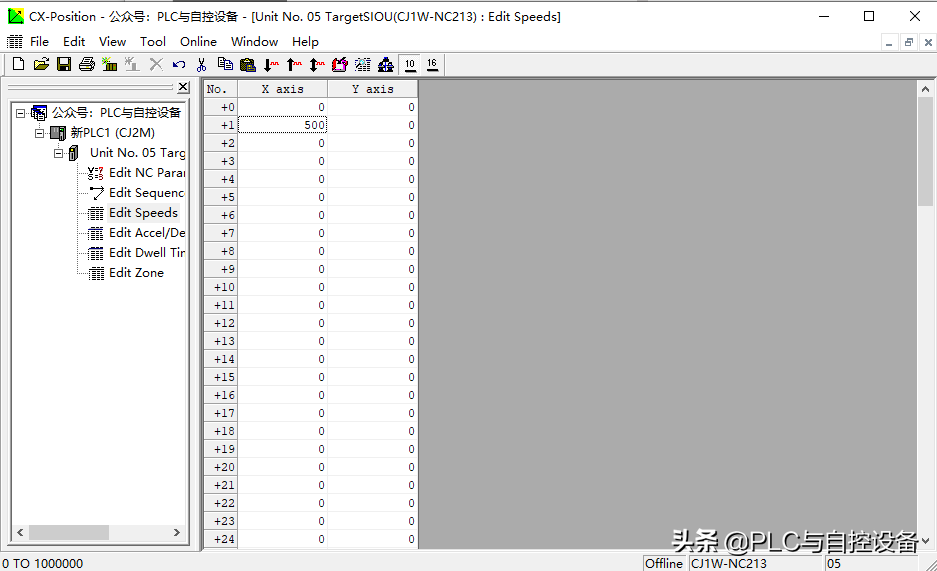
序列中速度数据(TargeSpeed)设为“1”,表示执行速度数据编号的速度值(500pps)。
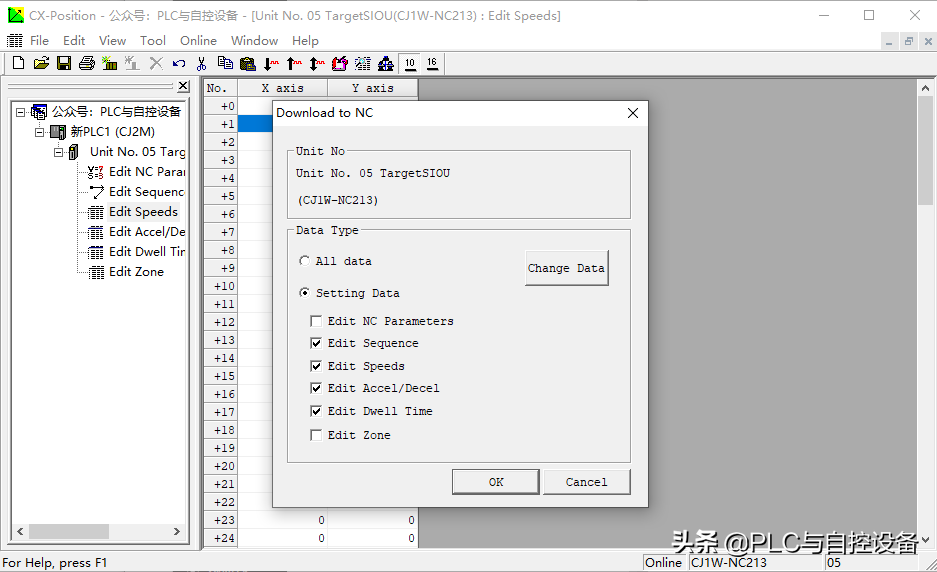
设置好后,将参数下载到NC单元中。
(四)、程序编辑