前面我们谈到S7-200SmartPLC中的PID相关问题,从如何通过向导组态PID控制回路到PID整定,,再到如何实现PID手自动的勿扰切换。那么我们今天继续来聊聊如何通过触摸屏进行S7-200Smart的PID参数设置和启动自整定功能?
STEP7-MicroWinSMART软件在使用PID向导进行配置时,需要在PID回路向导的组态界面,首先定义回路增益、积分时间、微分时间。如图下图1所示

图1.PID回路向导参数设置界面
当程序运行后,PID功能的参数可以通过软件监控表在线修改、或者通过上位机、触摸屏等外部设备修改,来实现PID参数的修改。
注意:上述方法可以修改PID的回路增益、积分时间、微分时间;PID的采样时间仅可通过PID回路向导参数设置界面设置,若需更改须重新下载程序。
一、通过外部修改回路增益、积分时间、微分时间
使用PID回路向导进行配置时,在组态界面最后会进行存储器分配,见下图2所示。此处分配的V区地址防止冲突调用,本例中起始地址选择VB0。
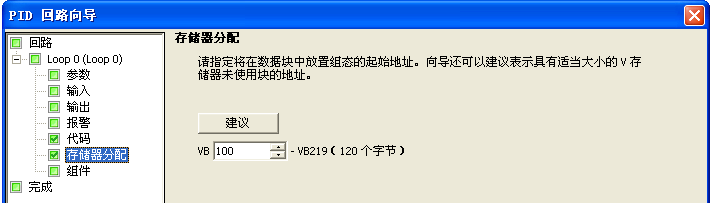
图2.PID回路向导存储器分配
通过查询PLC的符号表PIDx_SYM,请注意只有回路增益、积分时间、微分时间是可以修改的,其他参数可以当作只读参数。如用户希望能够在触摸屏上显示百分比的参数时,会用到标准化过程值和标准化回路输出等。如下图3所示
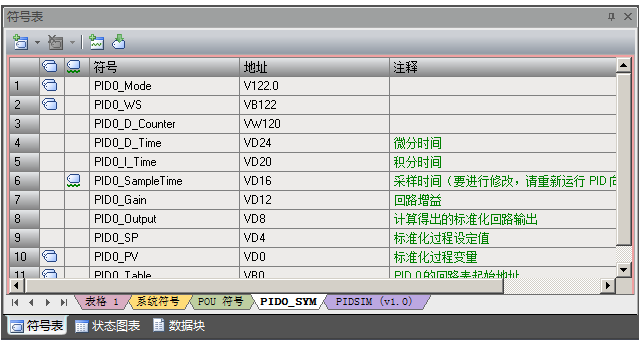
图3.PID回路符号表
二、PID回路表中应用于自整定部分的介绍
通过查询系统手册中《PID回路和整定》章节,PID回路表占用的存储器V区地址中所代表功能,见表1-PID回路表:
红色:PID自整定使能位、进行位、完成位、整定结果错误代码
蓝色:PID自整定结束后的建议参数(含增益、积分、微分)
黄色:PID运行时的增益积分微分,注意采样时间仅在组态界面设置,不可随意修改
绿色:PID自整定高级选项设置(关于动态响应的,默认为快速响应)
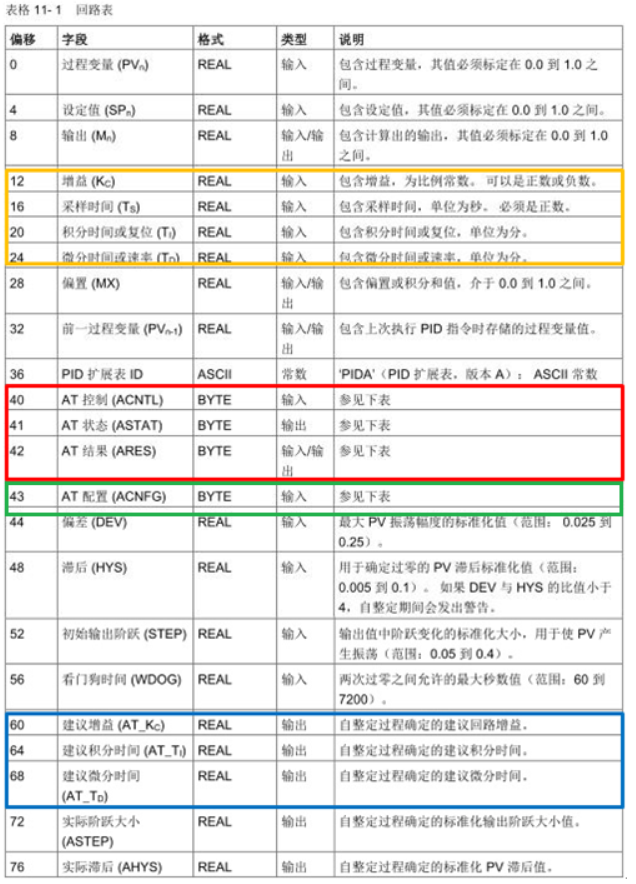
表1.PID回路表
PID回路表中的AT控制字、状态字、配置字节详细描述见表2:
ACNTL:=1启动PID自整定;=0停止PID自整定
ASTAT:=1自整定正在进行;=0自整定没有进行
ARES:=1自整定完成;=0自整定未完成。包含自整定结果代码,方便错误查询
ACNFG:和3=动态响应设置
注意:自整定完成位必须为0,自整定才能启动
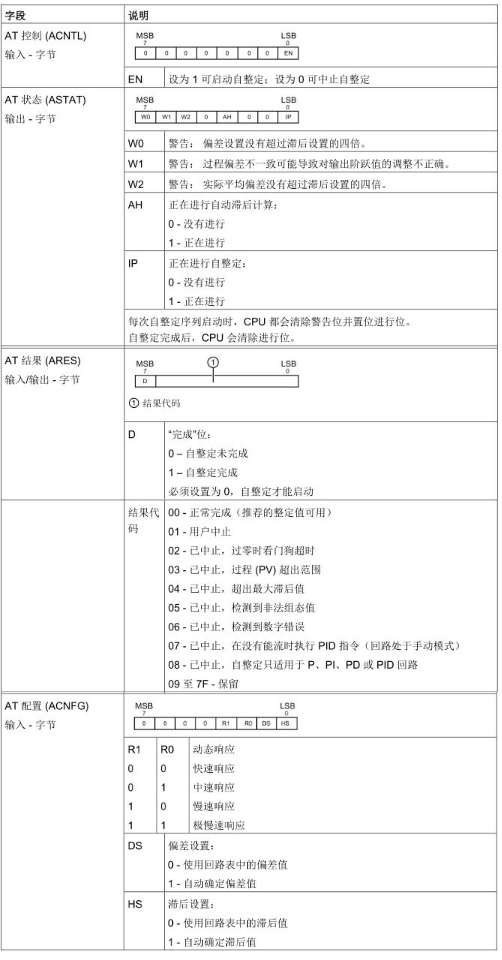
表2.PID回路表控制字、状态字、配置字节说明
三、通过外部使能PID自整定
PID回路表中是针对于PID存储器分配的首地址偏移量,若直接运用自整定部分控制字,具体地址可参考数据块PIDx_DATA,如下图4所示:
红色:控制字节第零位:PID自整定使能位;结果字结第七位:自整定完成标志位
蓝色:PID自整定结束后的建议参数(含增益、积分、微分)
黄色:PID运行时的增益、积分、微分
绿色:PID整定的动态响应设置
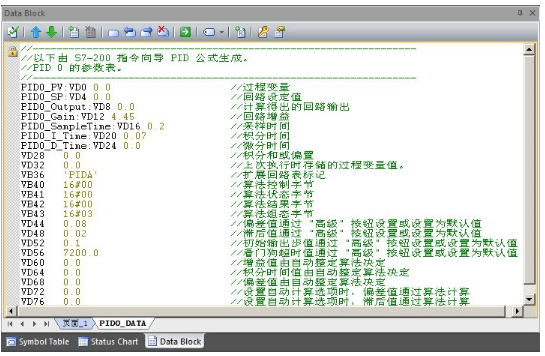
图4.PID回路符号表
对于PID自整定部分的编程思路简略如下:
在触摸屏上按钮直接连接(如),当按键按下时置位PID自整定使能位,启动自整定。
只有=0时才能启动自整定功能,当=1启动自整定后,=1表示自整定完成,期间可以使用=0随时中止自整定过程。
通过程序中判定当=1时表示PID整定已完成,将整定建议的参数传送(move)到PID运行参数里。
取出PID整定结果字节后七位,作为自整定状态和错误信息,如有错误可依此分析错误原因。具体代码表示含义参见表2。
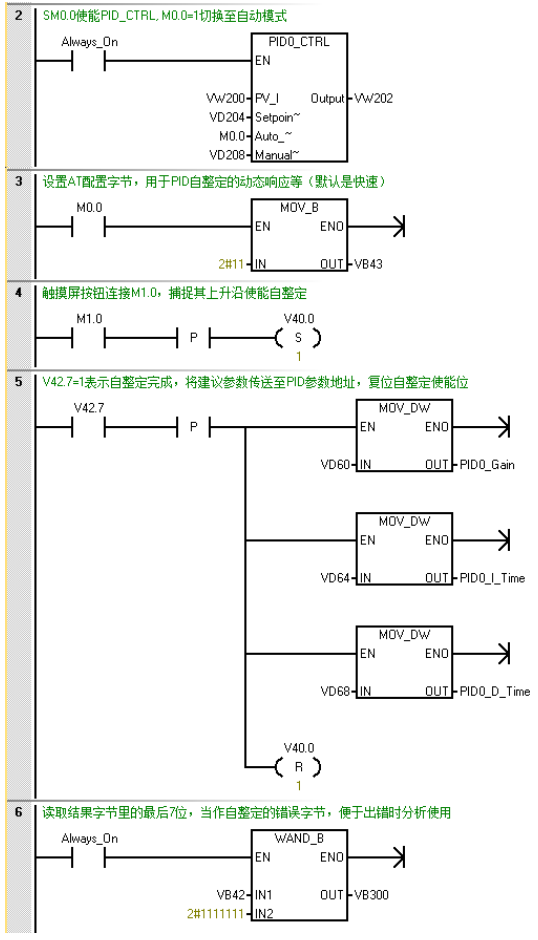
图5.PID整定部分编程思路
通过程序启动PID自整定(=1)后,可以使用PID整定控制面板监视PID回路的运行,如下图6所示:
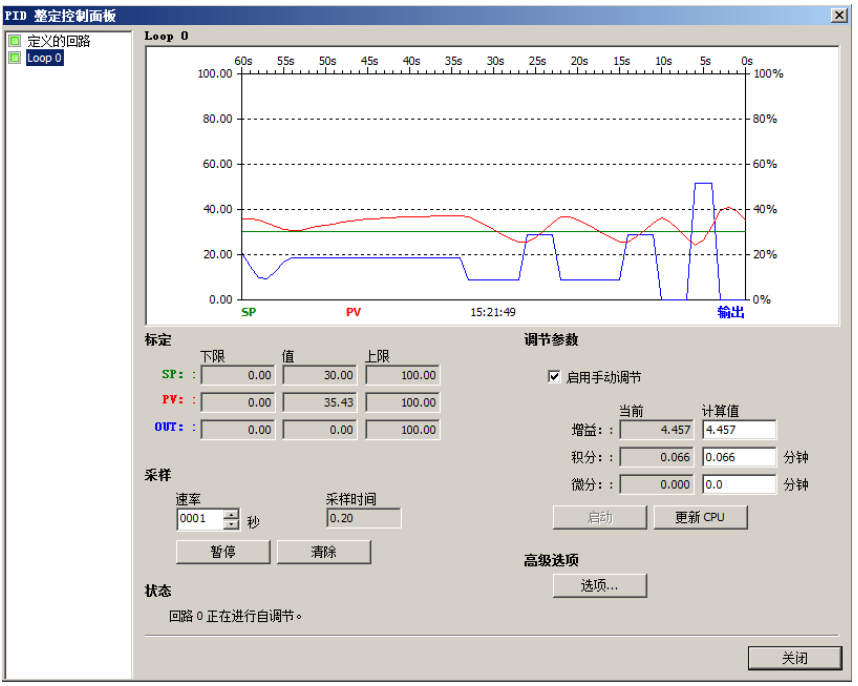
图6.PID整定控制面板
当自整定完成(=1)后,程序执行将整定后的参数更新到PID参数中。为保证参数断电后仍保持,建议在系统块-〉CPU属性-〉保持范围中设置属性,如下图七所示:
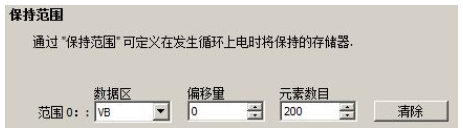
图7.系统块中的保持范围设置

")



