4.3.2回原点指令
(1)原点指令ZRN、DZRN
执行原点回归使机械位置与PLC内的当前寄存器一致的指令,如图4-13与表4-11所示:

图4-13ZRN指令格式
表4-11ZRN回原点指令操作数
操作数种类
内容
S1
指定开始原点回归时的速度。※1
S2
指定爬行速度。[10~32,767(Hz)]
S3
指定要输入近点信号(DOG)的输入编号的软元件编号。
D
指定要输出脉冲的输出编号。
※1.设定范围:16位运算时10~32767(Hz)
使用ZRN指令要确保原点信号在移动范围的一则,才可保证每次回原点的准确性:
例子:
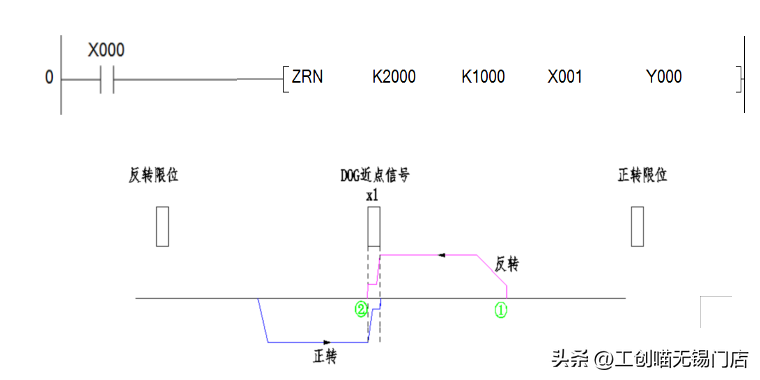
图4-14ZRN原点回归指令与回归方式
(2)带DOG搜索的回原点指令DSZR
执行原点回归使机械位置与PLC内的当前寄存器一致的指令,如图4-15与表4-12所示:

图4-15DSZR指令格式
表4-12DSZR回原点指令操作数
操作数种类
内容
S1
指定输入近点信号(DOG)的软元件编号。
S2
指定输入零点信号的输入编号。
D1
指定输出脉冲的输出编号。
D2
指定旋转方向信号的输出对象编号。
脉冲输出端对应的原点回归速度与爬行速度的特殊寄存器,如下列图所示:
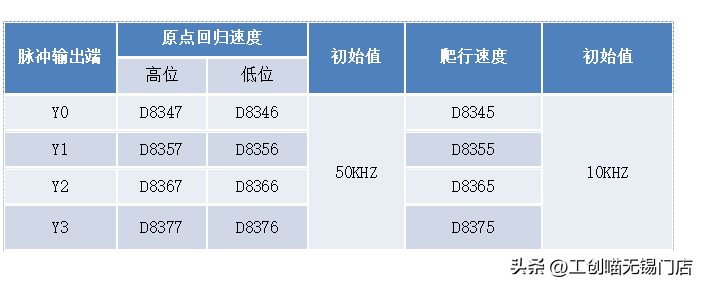
表4-13DSZR指令回归速度设置
例子:
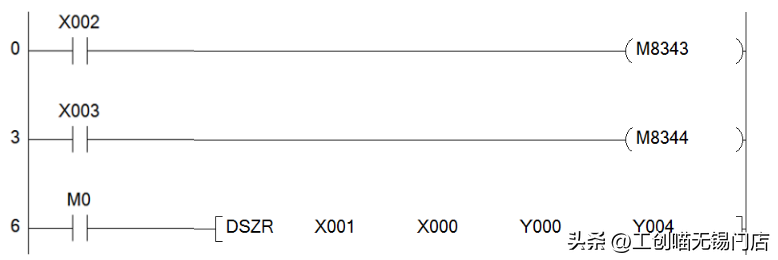
图4-16DSZR指令程序举例
图4-17DSZR指令回原点方式
版权声明:文章来源网络聚合,如有问题请联系删除。





