主从传动的概述主从传动控制是ABB变频器为多传动应用而设计的功能,系统由若干个ACS880变频器驱动,电机轴通过齿轮、链条或传送带等共同负载相互耦合在一起。负载可以均匀地分配在传动单元之间,负载连接方式如下图。
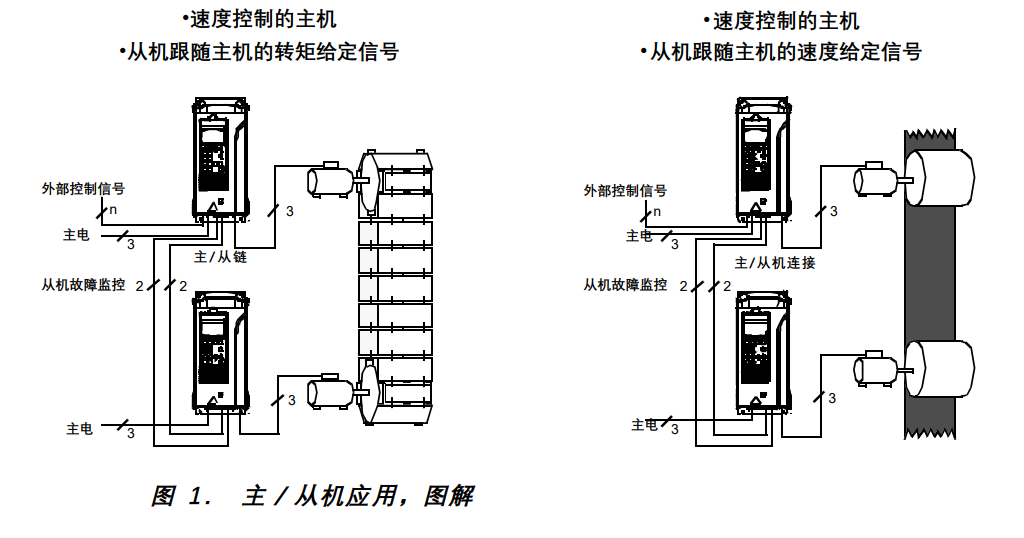
电机轴通过齿轮、链条的共同负载为刚性连接,如上图左则连接所示。电机轴通过传送带的共同负载为柔性连接,如上图右则所示。还有一种连接形式,既不是典型刚性连接,又不是典型柔性连接,如:主从共同负载连接不是齿轮、链条材料,但又类似上图左侧的连接形式。电机轴通过齿轮、链条的共同负载为典型刚性连接时,从机应该采用转矩控制模式,以使传动单元之间不存在速度差异。电机轴通过传送带的共同负载为典型柔性连接时,从机应该采用速度控制模式,因为传动单元之间允许存在微小的速度差异。主从共同负载连接不是齿轮、链条材料,但又类似上图左侧的连接形式时,从机应该采用转矩加速度控制方式,同时开启视窗控制功能,转矩选择器将速度调节器的输出加到转矩给定中,正常的运行范围内从机为转矩控制,当从机转矩未跟随到主机转矩时,视窗控制功能来调节。
ACS880变频器XD2D端子通讯主从控制
ACS880XD2D的主从
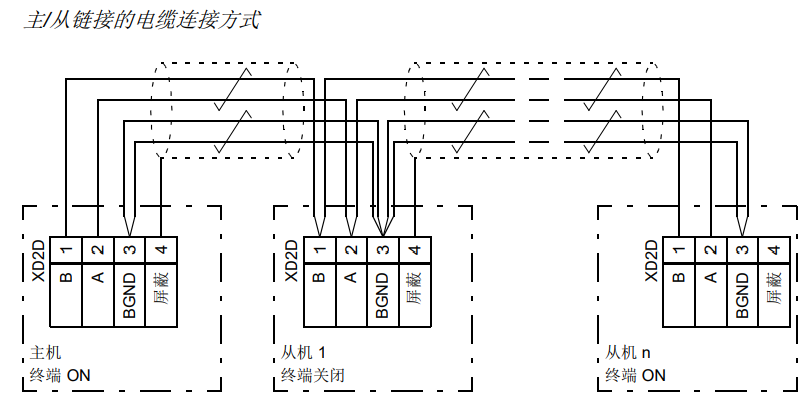
多台ACS880变频器连接起来组成主从链路,可以使用光纤电缆,但需要一个额外的FDCO通信模块,也可以使用XD2D端子用屏蔽双绞线电缆连接。变频器与变频器之间通讯链路是一个RS-485总线传输的环网,允许一台主机和多台从机的主从通讯。主机和最后一台从机变频器必须设置终端电阻为ON,XD2D端子连接方式原理如下图所示:
ACS880XD2D的主从控制的优势
ACS880的XD2D端子主从控制与ACS800主从控制的通讯比较见下表,如表所示,XD2D方式允许链路的最大长度为50m,主机和从机之间传输给定值最大延迟小于5ms,传输速率达4Mbit/s,高于ACS800变频器采用光纤主从时的性能。XD2D最大优势是采用普通屏蔽双绞线,避免了光纤应用时因环境灰尘污染带来的光纤通讯问题。ACS880的XD2D端子主从通信速度高、可靠、成本低,适用于造纸、炼钢、采煤、等系统。
acs880与acs800主从控制通讯比较
比较参数
ACS800主从控制
ACS880的XD2D主从控制
串行通讯类型
同频,全双工
同频,全双工
传输速率
4Mbit/s
4Mbit/s
传输媒介
光纤,光纤模块(RDCO-03C)
屏蔽双绞线(最长50M)
电缆长度
无限制
50M
从机个数
10
32
协议
ABB分布式传动通讯系统(DDCS)
ABB分布式传动通讯系统(DDCS)
所需模块
2块RDCO光纤模块
不需要
链路的通讯性能
传输时间间隔4ms最大传输延时16ms
传输时间间隔小于5ms
ACS880的XD2D端子通讯主从控制方式的系统硬件设计
ACS880变频器的主从功能的主机为速度控制,从机为转矩控制,从机跟随主机。如下图所示,图中造纸网部主棍电气控制系统作为变频器的上位机,把控制字、速度、转矩的指令发送到主变频器。ACS880变频器配置FSCA-01的RS-485总线适配模块,满足ModbusRTU协议。变频器间的通信采用XD2D端口,其本质是RS-485通信,通信介质采用普通屏蔽双绞线,其外部通讯连接如下图所示。

变频器XD2D方式的主/从通信参数设置
ABB公司ACS880系列变频器在XD2D主从应用时,主要针对60组、61组和62组参数设置主机和从机参数。
60组参数:
60.01主从通信端口,主机从机都设置为XD2D方式。
60.02主从节点地址,主机设置为1,从机设置为2,用于多个从机应用时区分主机监视的从机数据。
60.03主从模式,默认为未使用,定义变频器在主从链路上的角色。
DDCS主设备,变频器是主从DDCS链路上的主设备,DDCS链路由光纤电缆或XD2D方式的屏蔽双绞线电缆组成。采用XD2D主从控制时,主机应设置为DDCS主设备,上位机的控制指令发送给这台变频器。DDCS从设备,变频器是主从DDCS链路上的从设备。采用XD2D主从控制时,从机应设置为DDCS从设备,上位机不必向这台变频器发控制指令,本台变频器的控制指令来自主机。
D2D主设备。变频器是变频器间D2D链路上的主设备。D2D传动到传动的连接需要变频器包含N8010授权信息,使用ACS880应用编程编程,能够更灵活的实现变频器间的数据传递。D2D从设备,变频器是变频器间D2D链路上的从设备。DDCS强制,变频器在主从DDCS链路上的角色由其他参数定义。D2D强制,变频器在D2D链路上的角色由其他参数定义。
60.05主从硬件连接,定义主从链路的拓扑结构,采用XD2D主从方式时、主机和从机必须使用星型连接。
定义从哪些从设备读取数据:
60.14主从通讯的从机选择,该参数仅在主机中设置,定义从哪些从设备读取数据,主机参数应设置为从设备2。
定义从机故障时主机的动作:
60.17从机故障,该参数仅在主机中设置,此处主机参数设置为故障,即当从机故障时主机因FF7E故障跳闸,相当于增加启动互锁功能,防止从机变频器故障时故障范围扩大化。
61组定义D2D和DDCS链路发送的数据:
主机向从机发送的控制指令数据包括控制字、给定值1、给定值2。参数设置为:
61.01主从数据1选择=从机控制字,
61.02主从数据2选择=实际速度给定值,
61.03主从数据3选择=转矩给定值5实际值。
从机向主机发送的状态数据包括状态字、实际值1和实际值2,具体参数设置为:
61.01主从数据1选择=状态字16位,
61.02主从数据2选择=实际值116位,
61.03主从数据3选择=转矩给定实际值5。
62组定义D2D和DDCS链路接收的数据:
62.01主/从数据1选择、62.02主/从数据2选择,62.03主/从数据3选择。
三个参数定义了从机接收到的主机数据的用途,仅需要在从机中设置,具体设置为:
62.01=控制字16位,
62.02=给定值116位,
62.03=给定值216位。
外部(EXT1/EXT2)控制地的选择及控制模式:
主机和从机:19.11EXT1/EXT2=EXT1或EXT2
19.12Ext1,19.14Ext2控制模式:此参数设置变频器运行模式,默认为速度,主机设置为速度模式,从机根据负载连接状态设置为速度、转矩、相加、最小、最大。速度,速度控制采用的转矩给定值来自速度给定链输出。从机的速度指令来自主机的速度。主从机的电动机轴采用柔性连接时,可以采用此设置,允许主从机间存在轻微速度差别。转矩,转矩控制采用的转矩给定值为转矩给定链输出。从机的转矩给定值来自主机的转矩链输出,适用于主从机的电动机轴为刚性连接,不允许出现速度差。最小,转矩选择器在速度控制器输出和转矩给定值中取值较小的一个。仅在特殊场合下使用。最大,转矩选择器在速度控制器输出和转矩给定值中取值较大的一个。仅在特殊场合下使用。相加,转矩选择器将速度给定值链输出加到转矩给定值链输出。变频器在正常的运行时为转矩控制,出现速度偏差超过窗口范围时,视窗控制会使误差送到速度控制器,通过速度控制器的输出引起速度升高或降低,以增加或减少内部转矩给定值。采用相加选项和视窗控制一起使在转矩控制模式下的从机形成一种速度监视功能,同时保证了从机跟随主机的动态响应性能。对于造纸设备主压棍和伏棍调速系统而言,共同负载的电机轴连接不是完全的刚性连接,因此从机参数宜采用相加设置。
速度误差窗口控制:
24.41速度误差窗口控制使能=允许
启用速度误差窗口控制,使变频器具备转矩控制的速度监测功能。速度误差窗口控制仅在相加模式激活时,或在变频器为从机速度控制时有效。从机应允许速度误差窗口控制,同时设置速度误差窗口控制上下限值。
速度误差窗口控制方式:
24.42速度误差窗口控制方式=正常转速控制(即通过观察25组参数的25.02、25.03、25.04的值来控制,如果设为P控制、则只观察25.02值来控制)。
速度误差窗口控制上下限值:
24.43速度误差窗口控制上限=5r/min。(即正转时给定值-24.43值触发调整)。
24.44速度误差窗口控制下限=5r/min。(即正转时给定值+24.43值触发调整)。
选择外部启停、方向命令源:
20.01Ext1命令。
主机:20.01EXT1=主机设置为IN1启动或其它方式。
从机:20.01EXT1=从机设置为主从连接。从机:20.02EXT1触发=电平。
从机:20.06EXT2=从机设置为主从连接。从机:20.07EXT2触发=电平。
从机速度、转矩给定源选择:
采用XD2D主从功能的从机,需要设置如下:
22.11速度给定1选择=主从给定值1,
26.11转矩给定1选择=主从给定值2。
下表为造纸设备主压棍与伏棍的主从控制参数,根据你控制的设备参考。
主机
从机
参数组
功能
设置参数
参数组
功能
设置参数
60.01
M/F通讯端口选择
XD2D
60.01
M/F通讯端口选择
XD2D
60.02
M/F节点地址
1
60.02
M/F节点地址
2
60.03
M/F模式
DDCS主设备
60.03
M/F模式
DDCS从设备
60.05
M/F通讯连接方式
星型连接
60.05
M/F通讯连接方式
星型连接
60.08
M/F通讯丢失超时
1000
60.08
M/F通讯丢失超时
1000
60.10
主/从给定值1类型(fef1)
自动
60.10
主/从给定值1类型(fef1)
速度
60.11
主/从给定值2类型(fef2)
转矩
60.11
主/从给定值2类型(fef2)
转矩
60.14
读取从站数据的节点选择
从节点2
60.17
从机故障(仅在主机设置)
故障
61.01
M/F数据1选择(主机发送给从机的启停,方向控制)
从机控制字
62.01
M/F数据1选择(从机接收数据,从机设置)
控制字16位
61.02
M/F数据2选择(主机发送给从机的速度数据)
速度给定值
62.02
M/F数据2选择ref1(从机接收数据,从机设置)
给定值116位
61.03
M/F数据3选择(主机发送从机的转矩数据)
转矩给定值5实际值
62.03
M/F数据3选择ref2(从机接收数据,从机设置)
给定值216位
62.04
2号从机数据1选择
传动状态字
61.01
M/F数据1选择
状态字16位
61.02
M/F数据2选择
实际值116位
61.03
M/F数据3选择
实际值216位
19.11
EXT1/EXT2选择
EXT1
19.11
EXT1/EXT2选择
EXT1
19.12
Ext1控制模式
相加
20.01
Ext1启、停、方向命令源
IN1启动
20.01
Ext1启、停、方向命令源
主从连接
20.02
EXT1启动触发
电平
20.02
EXT1启动触发
电平
20.03
EXT1输入1信号源
DI1
20.03
EXT1输入1信号源
DI1
20.12
运行使能1
DIIL
20.12
运行使能1
选择
22.11
速度给定1源选择
AI1换算值
22.11
速度给定1源选择
主从给定值1
24.41
速度误差窗口控制使能
允许
24.42
速度误差窗口控制方式
正常速度
24.43
速度误差窗口上限
5r/min
24.44
速度误差窗口下限
5r/min
26.11
从机转矩给定1源选择
主从给定值2
96.04
应用宏的选择
工厂宏
96.04
应用宏的选择
转矩宏
90.41
估算
90.41
估算
主从控制的负载平衡调速方法:
主从采用柔性连接,在主从都是速度控制的情况下,有时需要微调来达到转矩和速度的平衡。
微调有二种方法:
调用主从的25.08speeddrooping,微调主从的速度给定,来达到转矩和速度的平衡。
Loadshare方式,涉及的参数有,23.40,23.41,23.43,23.44,26.15。
从而达到最佳效果。
调整的目的都是修正主机和从机的速度给定,让主从的转矩和速度平衡。
调试经验:
从机的速度限幅要大于主机,并且最小速度限幅要为负值,避免从机触发速度限幅造成的转矩震荡。
主从的加减速时间要一致,速度环的PID参数要一致。
主从的电机模型参数要一致(98组参数,通过辩识得到的数据)。
注意从机的控制字,若发送过来的FoollowerCW,停机期间从机接受主机的给定值运行,当主机停止,调制机发给从机控制字第三位变为0。
未给作者许可,不得转载,否则追究法律。





