一、运动控制的概述:
1、S7-200SMARTCPU通过本体的晶体管输出点,实现运动轴控制:内置于CPU,用于速度和位置控制。
2、S7-200SMARTCPU提供了三种开环运动控制方法:运动控制向导,PTO(脉冲串输出)及PWM(脉宽调制)
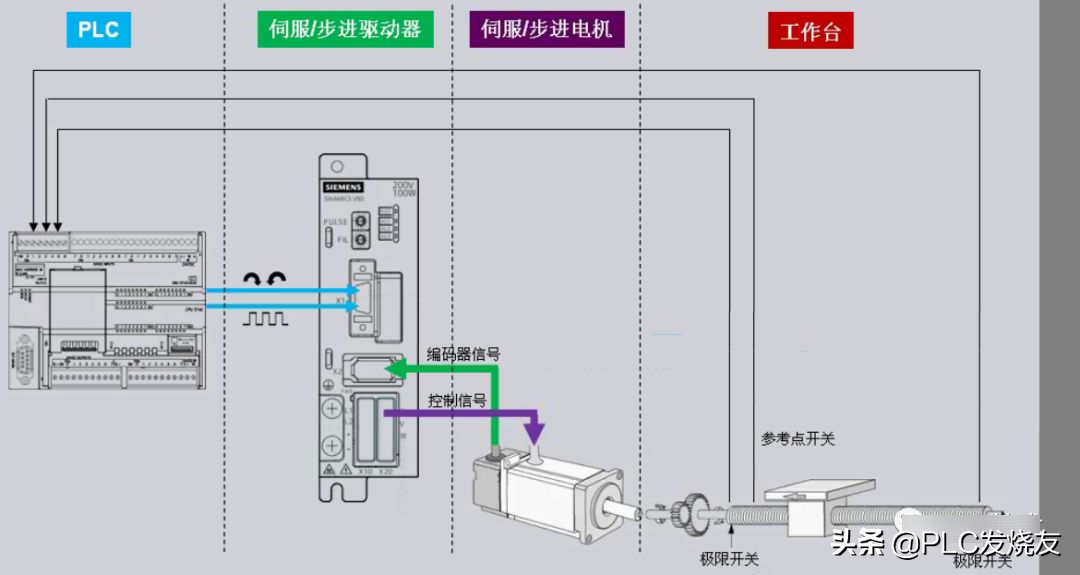
二、电机运行的控制方式及框架:
PLC控制电机的两种方式:一种是采用通信控制变频器;另一种是高速脉冲输出的方式控制伺服电机(此种方式只支持晶体管型CPU)
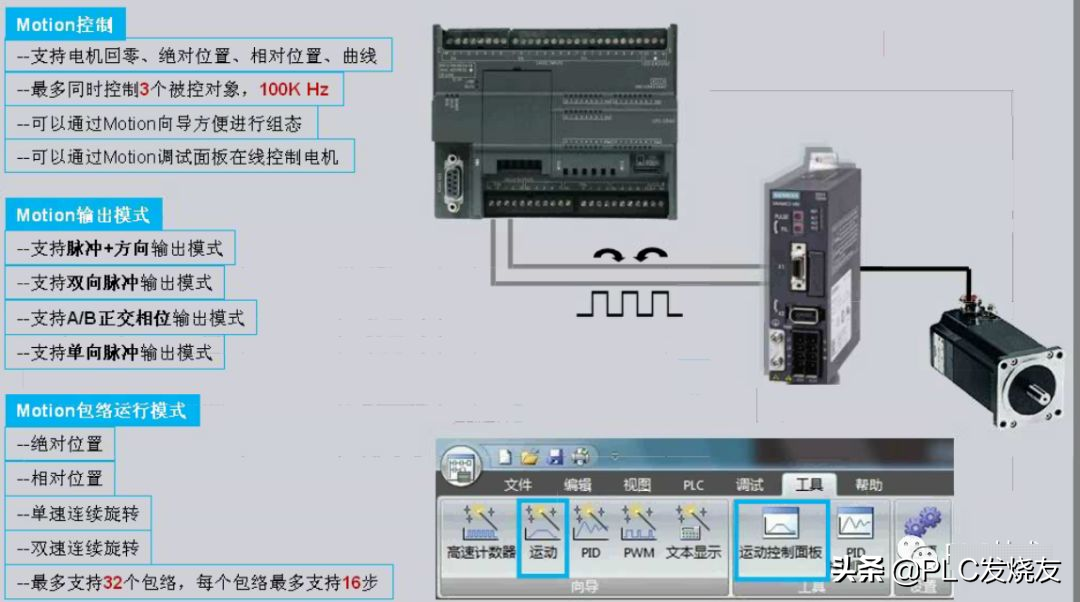
三、运动控制总览:
S7-200SMART提供3个轴的开环位置控制所需要的功能和性能:
1、提供高速控制,速度从每秒2个脉冲到每秒100,000个脉冲(2HZ到100KHZ);
2、提供可组态的测量系统,既可以使用工程单位(例如英寸和厘米)也可以使用脉冲数;
3、提供可组态的反冲补偿;
4、支持绝对、相对和手动位控方式;
5、提供连续运行操作;
6、提供多达32组移动曲线,每组最多可有16步;
7、提供4种不同的参考点寻找模式,每种模式都可对起始的寻找方向和最终的接近方向进行选择。
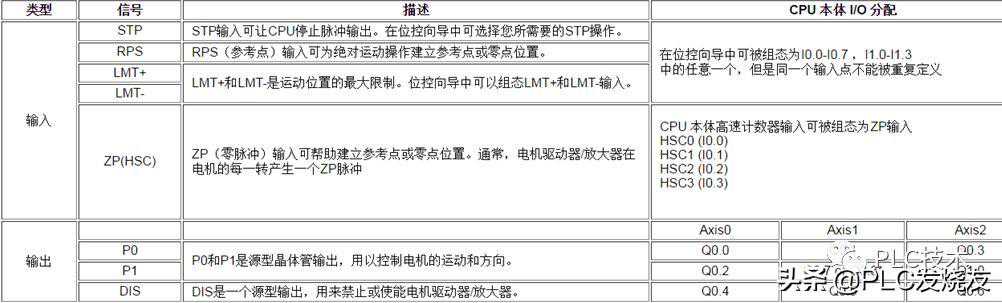
运动控制输入/输出定义:
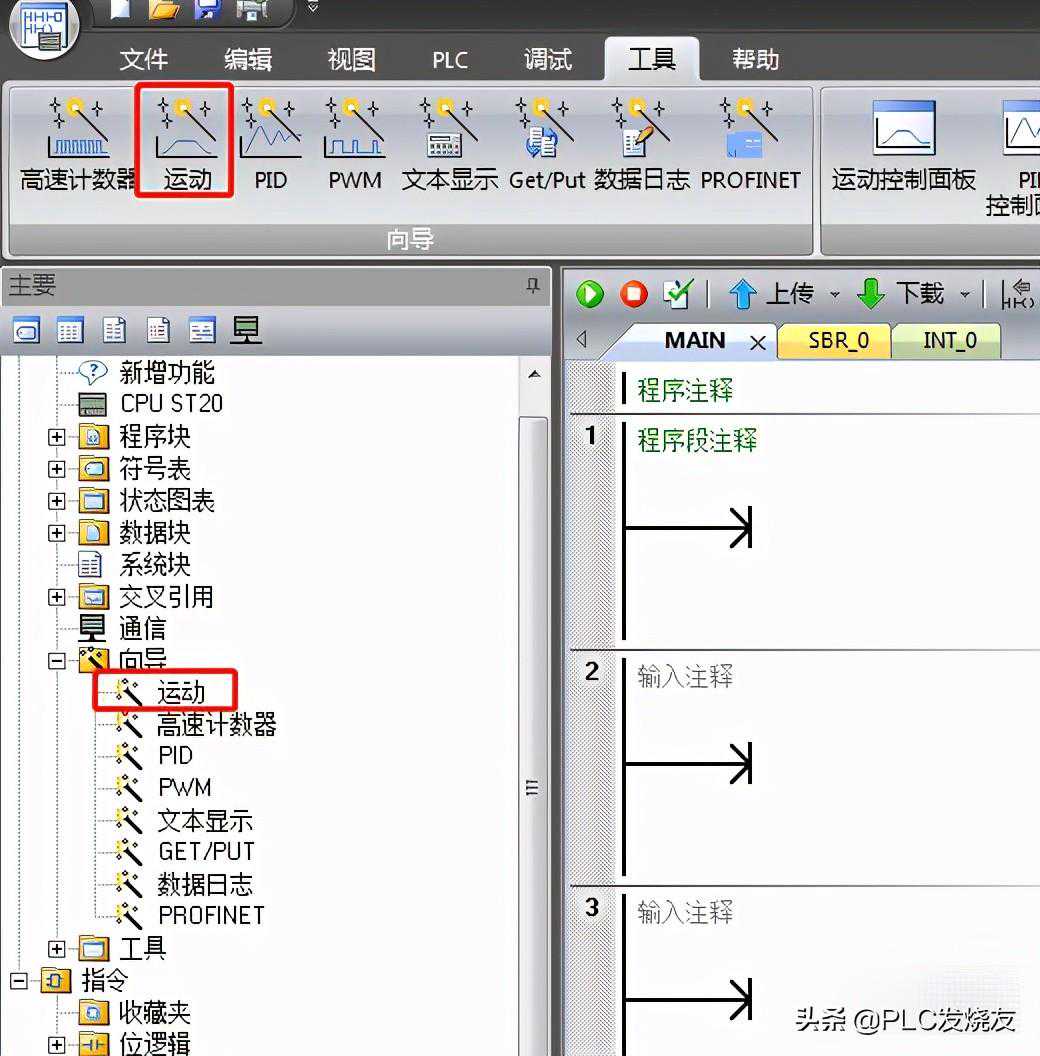
四、运动控制向导
1、打开“运动控制”向导,“工具”-“向导”-“运动控制”
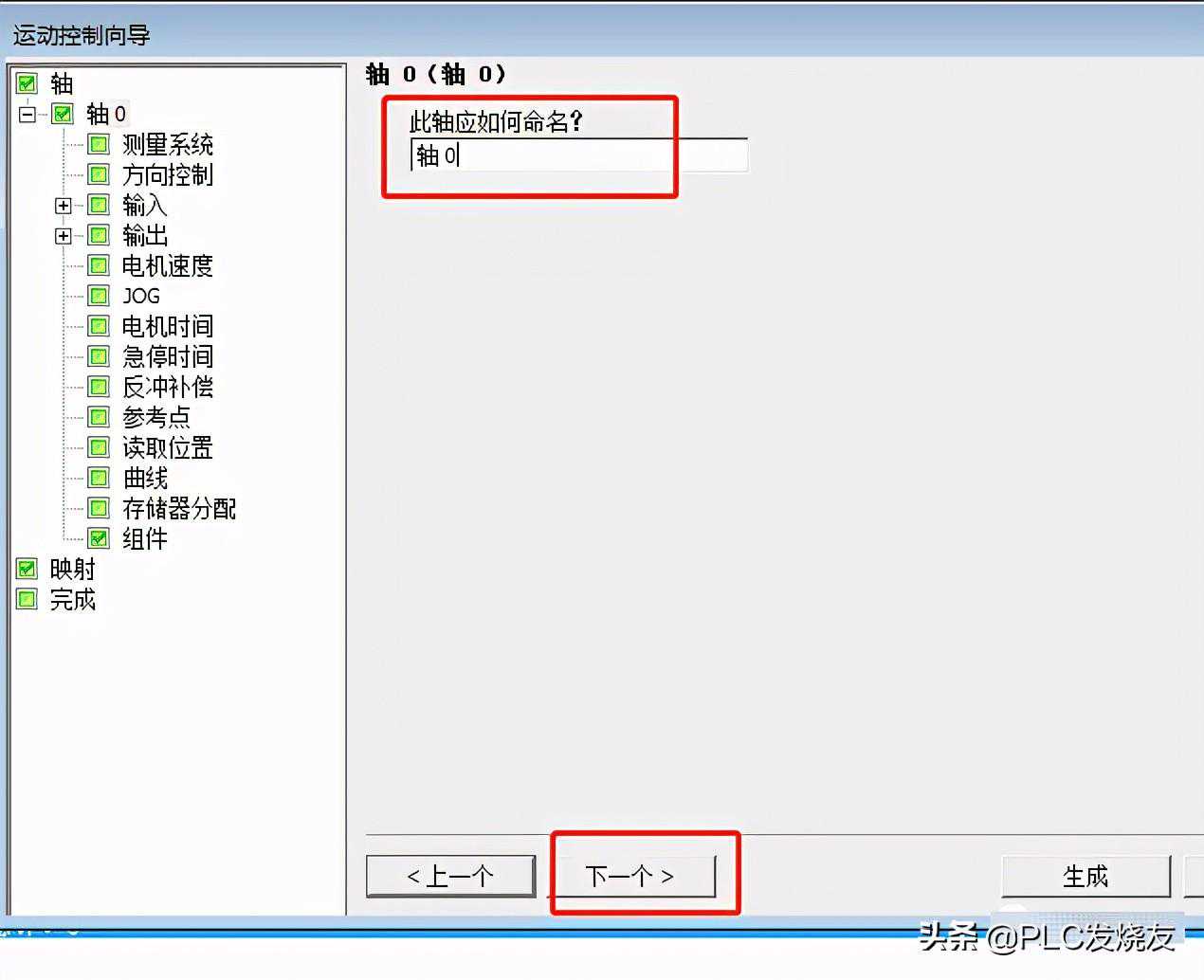
2、选择需要配置的轴

3、命名轴名称;也可默认不更改
4、选择测量系统的方式;
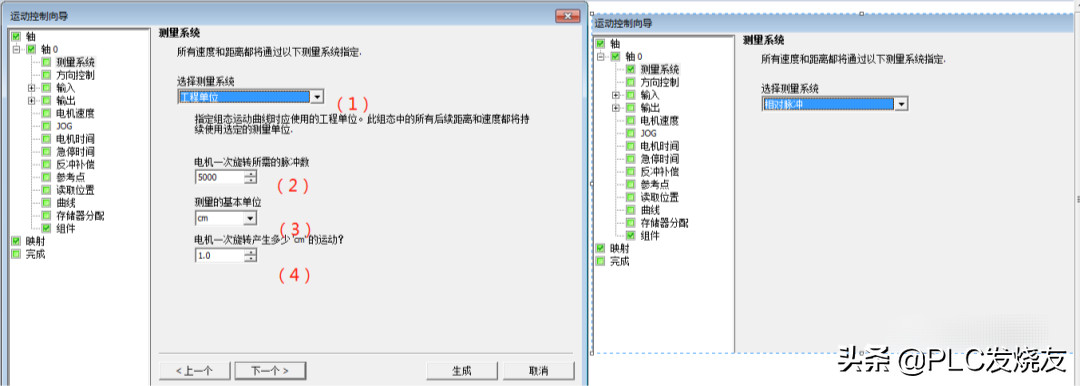
(1)有工程单位和相对脉冲两种方式
(2)指电机一圈所需要的脉冲数,如是步进电机时,具体根据驱动器的细分决定
(3)选择工程单位时,可根据实际情况选用CM、MM、M、英尺、弧度、度、英寸这几种测量单位
(4)步进/伺服所走一圈的距离;也就是通常提到的螺距
如选用相对脉冲上诉参数忽略
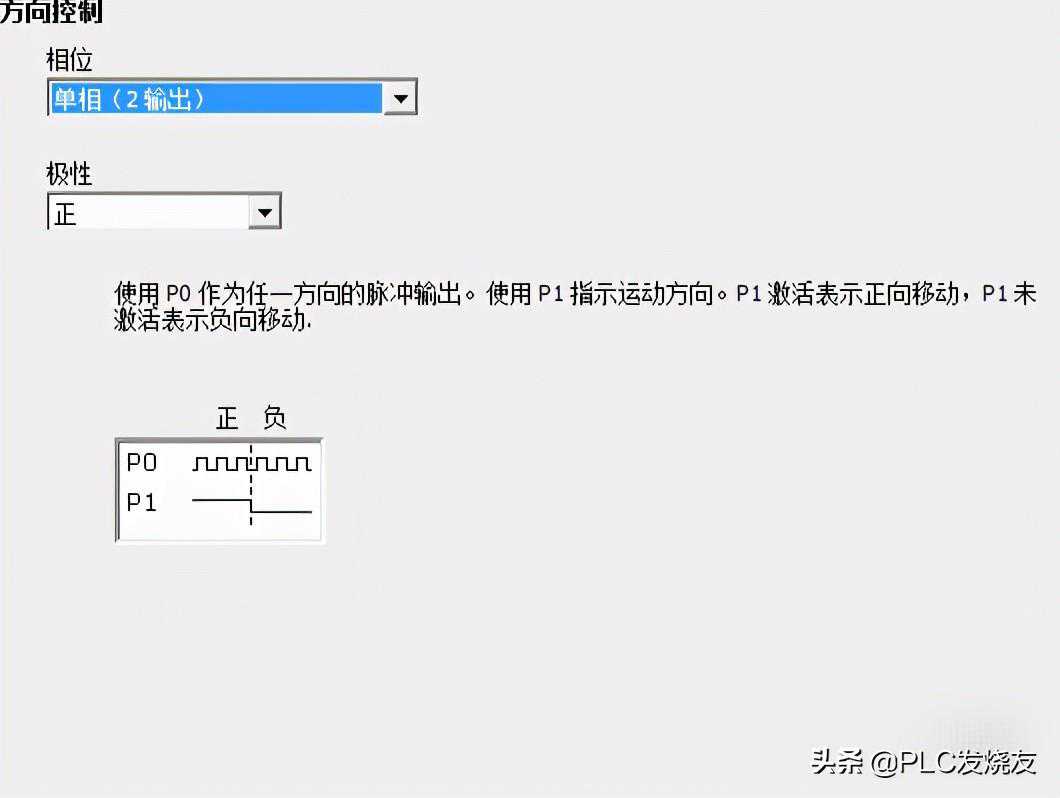
5、设置脉冲方向输出
脉冲输出的方式有4种
(1)单相1输出:但发脉冲,没有方向信号;适合连续旋转
(2)单相2输出:P0发脉冲,P1作为方向信号(通常使用这种模式)
(3)双相两输出:正反方向各一个输出发脉冲信号
(4)AB正交相两输出:AB相互成90°的相位角的差动输出
极性选择:正表示P1=1时正方向旋转P1=0时表示反方向旋转
负表示P1=0时正方向旋转P1=1时表示反方向旋转
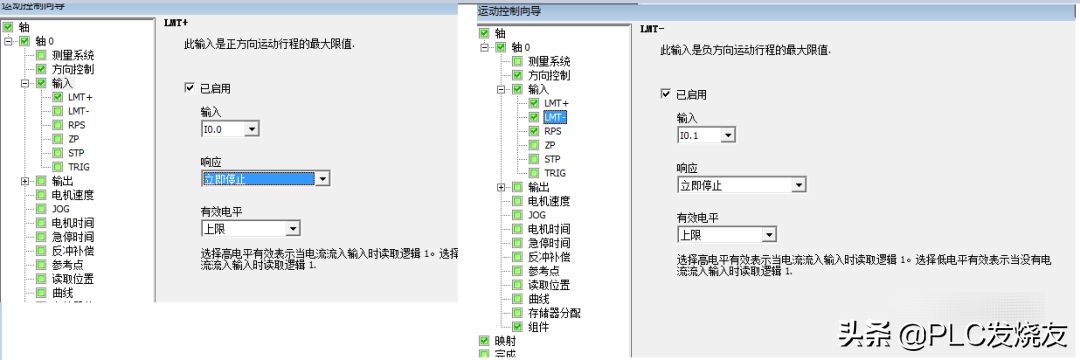
7、组态输入点:
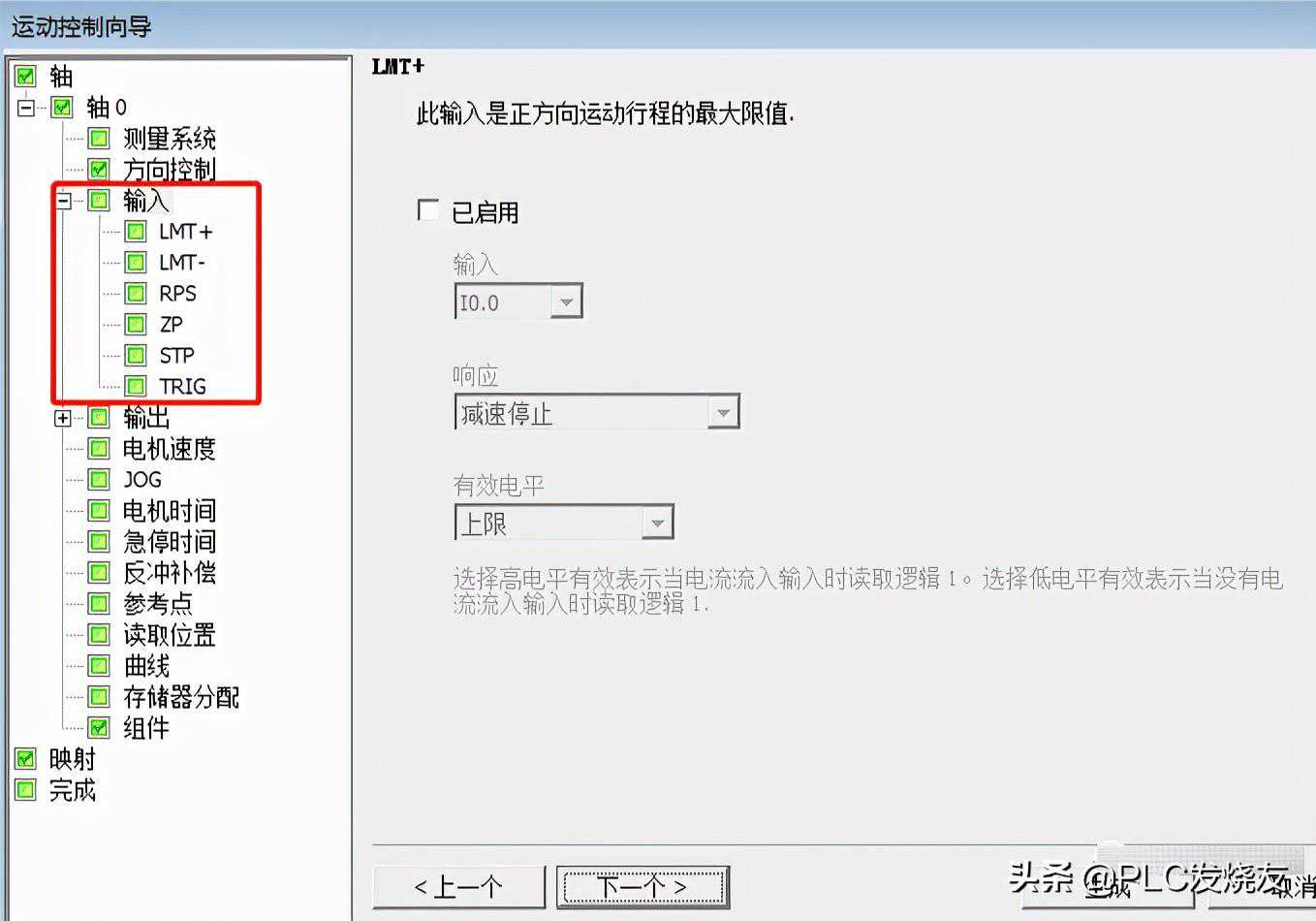
LMT+/-表示运动旋转的最大极限位,“+”表示正方向的极限位;“-”反方向的极限位
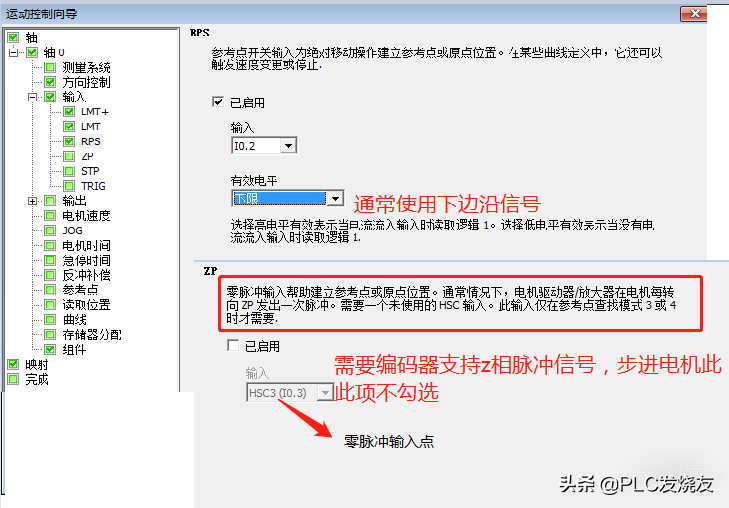
RPS表示参考点信号ZP表示Z相脉冲信号
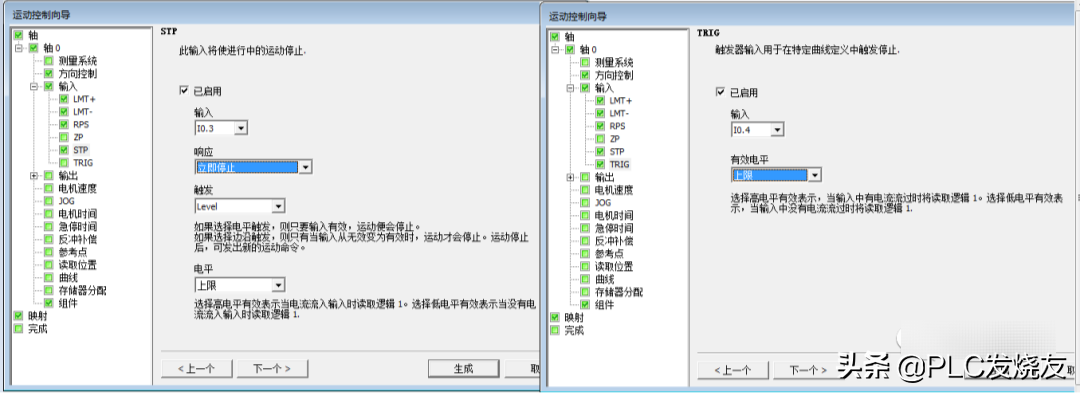
STP表示停止信号输入点
TRIG表示变速信号,主要用于GOTO指令的连续旋转功能
以上输入信号可组态I点的任意一个,但同一个点不得重复定义
作者:技成-眭相建,未经授权不得转载





