FUX3U相对与绝对定位控制指令
要点:相对定位指令DRVI和绝对定位指令区别
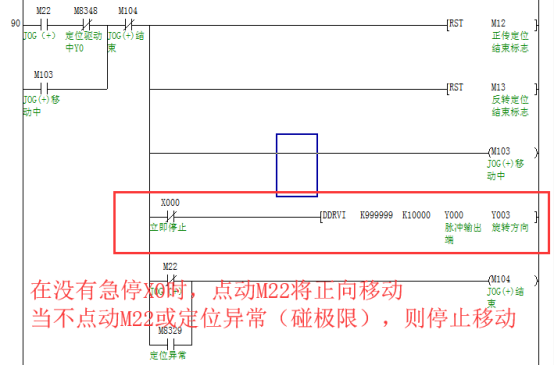
1、相对定位指令DRVI:以当前工作台的停止位置为起点,指定移动方向和移动量
2、相对定位指令:以原点基准指定位置进行定位,与工作
台的当前停止位置没有关系,与起点位置无关。
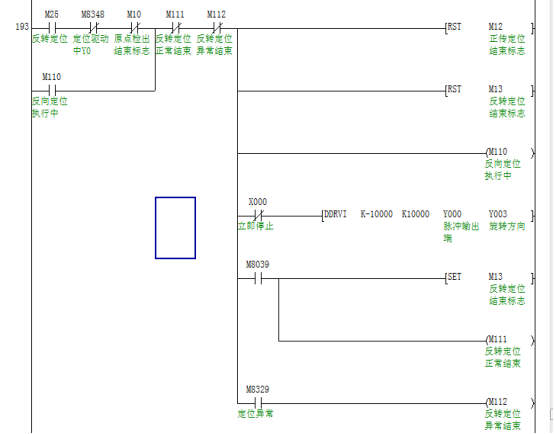
一、相对定位指令DRVI
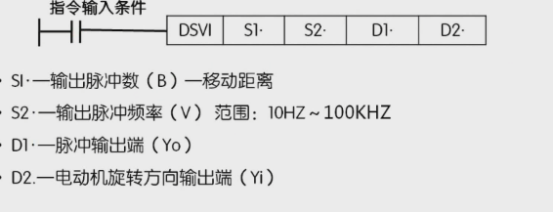
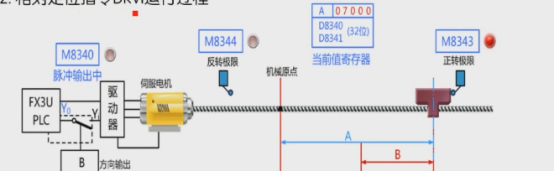
2、相对定位指令DRVI运行过程
Yi电机方向输出端可任选
B值为正,电机正转运行,当前值寄存器递增
B值为负,电机反转运行,当前值寄存器递减
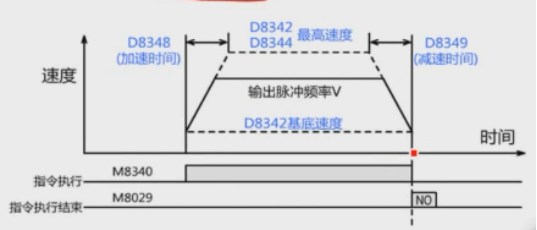
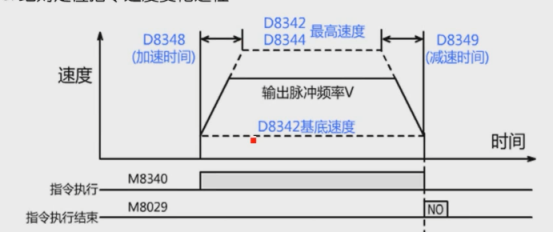
3、相对定位指令DRVI的速度变化过程
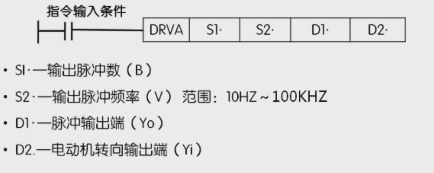
二、绝对定位指令DRVA
1、绝对定位指令指令格式
2、绝对定位指令运行过程
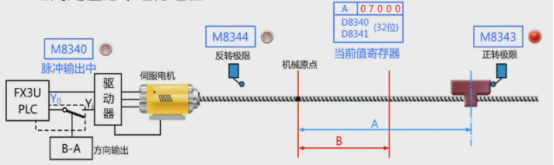
Yi电机方向输出端可任选
B-A=正,电机正转,当前值寄存器递增
B-A=负,电机反转,当前值寄存器递减
举例来说明下:
相对定位指令:相对当前位置。
绝对定位指令:相对原点位置:

关于应用到的位寄存器和数据寄存器在我上一篇文章所讲到的原点回归指令中有说明,可以参照上一篇文章。
感谢大家的支持,在写完定位控制后,我会将我写的文档和程序给大家上传,希望能通过这一系列文章给大家带来启发和指导。最后感谢大家的支持,我会继续努力,争取给大家带来对大家有益的文章。
版权声明:文章来源网络聚合,如有问题请联系删除。





